In a parallel robot a number of serial chains (usually called legs) is employed to support a single mobile platform, normally equipped with the end-effector. This yields desirable features such as a large payload to robot weight ratio, remarkable accuracy and repeatability, low inertia and high dynamic performances. We mainly focus our study on the analysis and design of parallel manipulator and mechanism to develop new interesting architectures and, from last year, we started investigating continuum parallel robots, a particular kind of parallel manipulators where legs composed by rigid links are replaced by slender flexible components.
Analysis and Design of Parallel Robots and Mechanisms
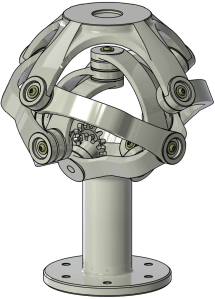
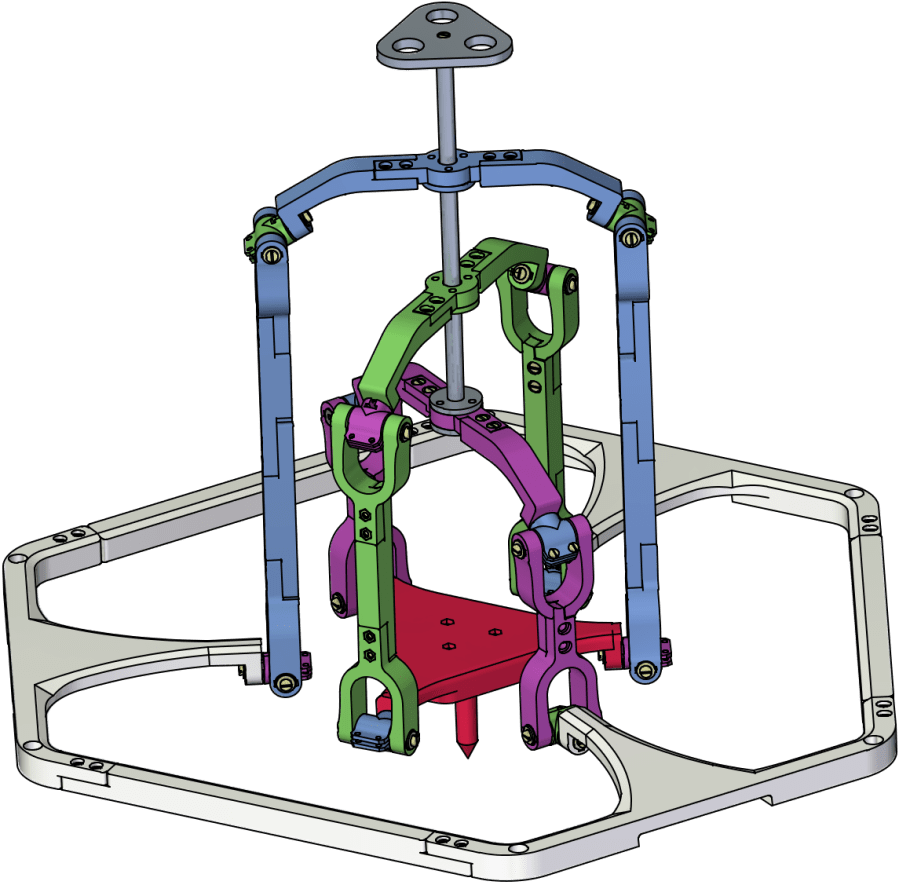
In order to overcome the typical drawbacks of closed-chain mechanisms (e.g. limited dexterity, involved kinematic relations, critical singularities) while preserving their favorable characteristics (e.g. large payload to robot weight ratio, stiffness, high dynamic performances), innovative families of parallel manipulators were conceived for special end-effector motions, such as translational, Schoenflies and rotational motions. In many cases, the proposed architectures exhibit decoupled output motion, i.e. each base-mounted motor directly actuates one of the output degrees of freedom, or are able to perform symmetric manipulation tasks, e.g. efficient manipulations of line-symmetric or plane-symmetric objects. Some of these mechanisms (usually called fully-isotropic) exhibit constant and one-to-one input-output kinetostatic relations, so that their behavior in terms of force and velocity transmission is maximally regular throughout the workspace and singularities are potentially ruled out.


Continuum Parallel Robots
Continuum Robots (CRs in short) are manipulators that achieve movement through controlled displacements and deformations of slender elastic links, such as rods. Their design is inspired by biological structures like trunks, tentacles, snakes, and tendril.
CRs have historically been considered as serial devices, because they usually display long and slim shapes. However, recent research highlighted that many continuum designs show some features of parallel kinematic architectures and, thus, the term Continuum Parallel Robot (CPR in short) was defined. In a CPR, several elastic thin members are connected in a parallel arrangement to an end-effector. Compared with traditional parallel rigid-link robots, CPRs promise advantages like simpler low-inertia mechanical structures, and intrinsic compliance. In contrast with serial CRs, CPRs may gain higher precision, better stability, higher payload, and they could have the potential to be used in applications like industrial tasks or surgical operations.
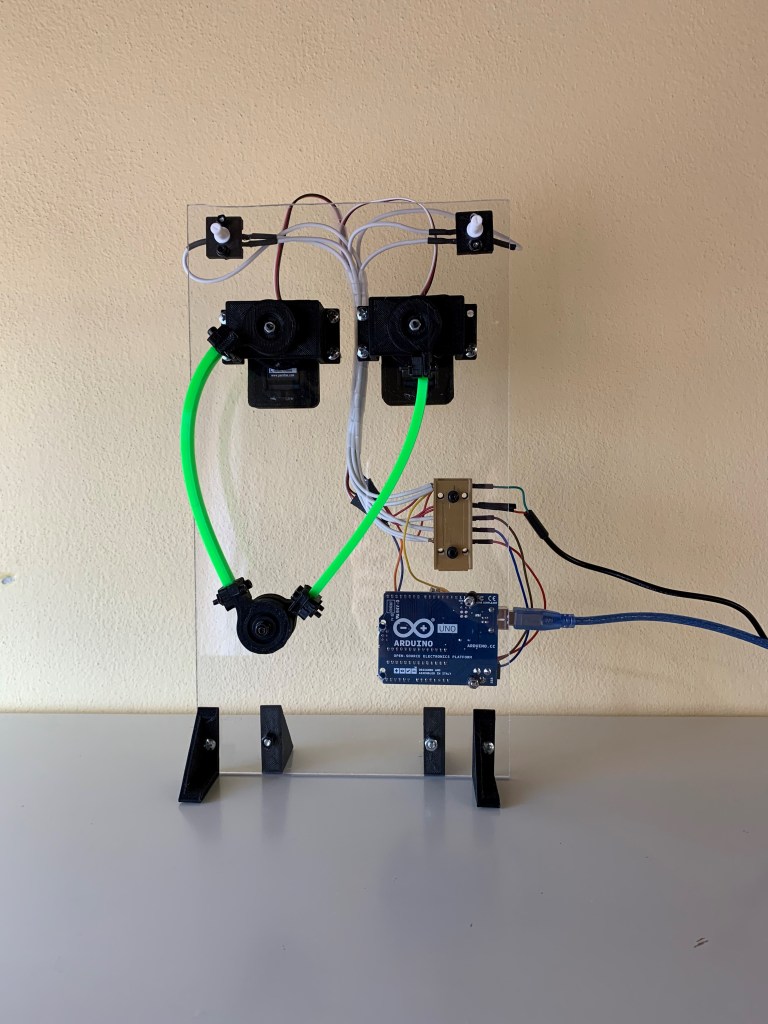
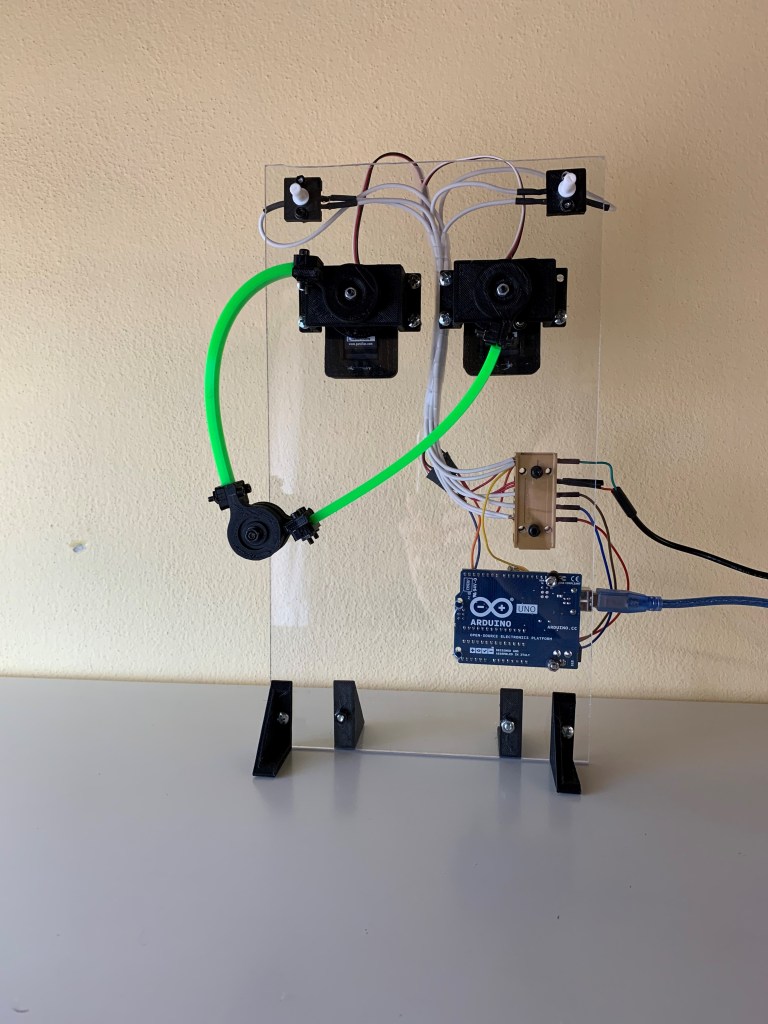
Until now, we have mostly focused our attention on the modelling strategies suitable for CPRs and their potential applications. We have recently designed and built our first prototype. The manipulator was entirely produced with additive manufacturing and is controlled with an Arduino board. Upgrades for both mechanical design and firmware are almost ready to be implemented.