As a research group, we believe that industrial research is a key topic to stimulate the growth and development of universities and enterprises. The exchange of knowledge and the implementation of projects increases the attractiveness of universities, the competitiveness of enterprises, the employability of students and the economic and social growth of the involved partners.
Hereafter is a presentation of the active projects on which we are currently working, as well as a collection of past projects and partners.
Active Projects
APACHE-Advanced maniPulation, grasping and control for enhanced machinery Autonomy and reConfigurability in pHarmaceutical processes and E-commerce packaging
APACHE aims to enhance robotic flexibility in pharma and e-commerce by replacing single-purpose mechanisms with adaptable robotic solutions. Innovations include automatic motion (re-)planning, optimal packing, the employment of novel electrostatic grasping tools, and autonomous reconfiguration of production line controls. This enables machines to reconfigure in real-time, handling variable products and processes minimizing expert intervention.
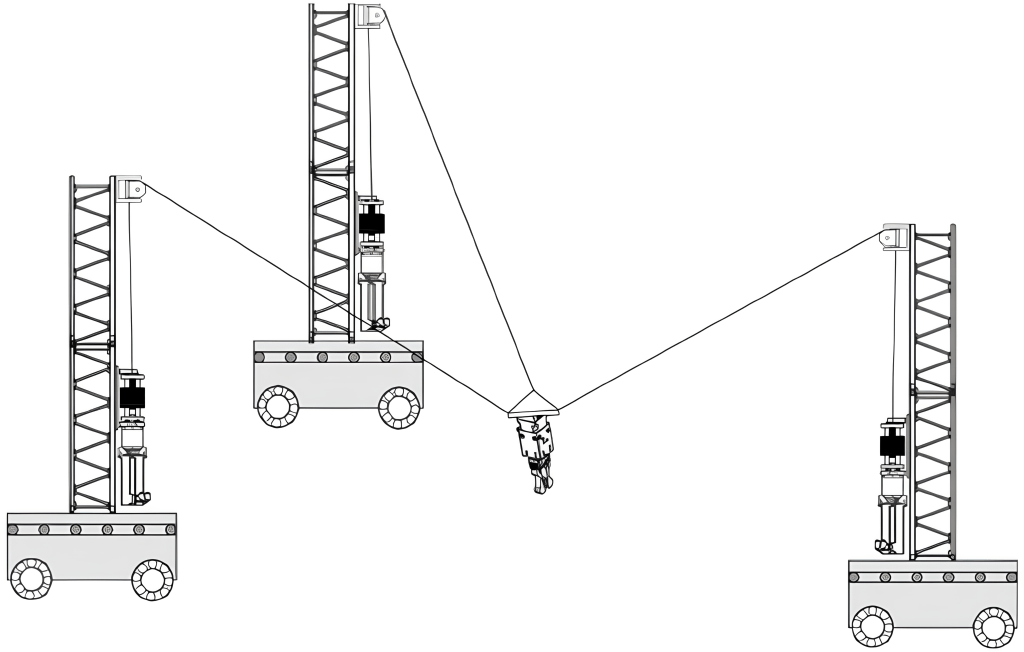
Reconfigurable large-scale robotic manipulation
The project’s objective is to create a large-scale reconfigurable cable-driven robotic system capable of swift deployment for façade work. The robot must exhibit adaptability to various working conditions. In pursuit of this goal, the project seeks innovative design solutions that incorporate the integral installation of robot actuators and sensory equipment on the end-effector
MATRIX – Robotic Handling of Liquids for High-Performance Industrial Applications
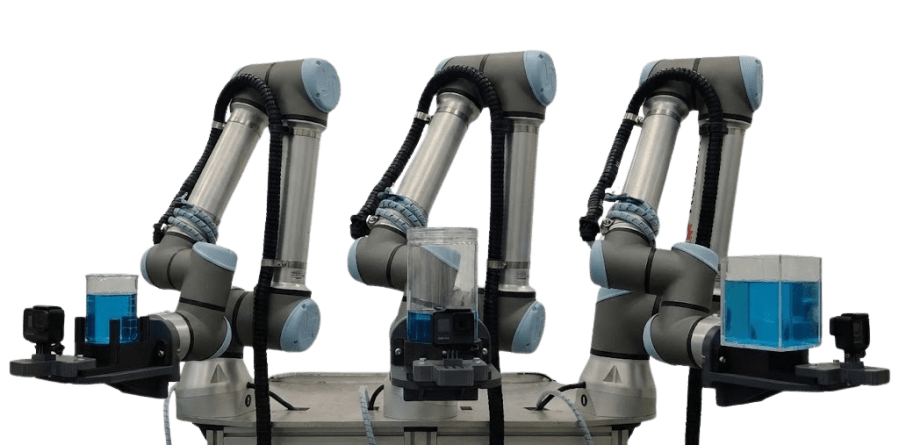
In the field of automatic packaging machines, it is often required to handle liquids while minimizing the oscillation of the liquid inside the container (the so-called “sloshing” motion). The possibility of manipulating several cylindrical containers simultaneously by a single robot or a single container by two robots will be explored, in both prehensile and non-prehensile configurations.
Analysis of Dynamic Loads on Goods Transported by Road Vehicles
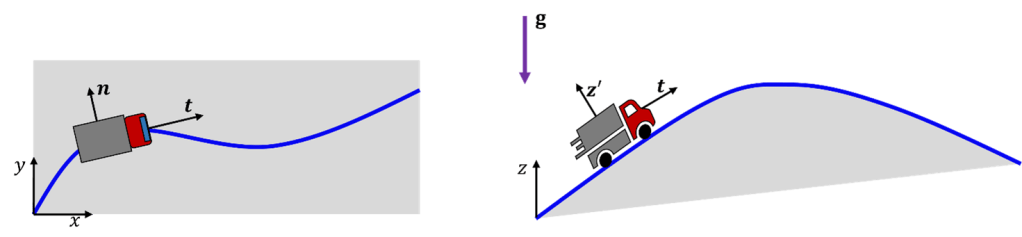
In the packaging industry, pallet stretch wrapping and banding, crucial to protect and stabilize the goods, are obtained by applying a certain number of cellophane layers around the palletized load. To reduce waste, the number of layers to be applied may be optimized by running a FEM analysis simulation. The aim of the project is to present a numerical methodology that allows to identify the most demanding cases and the corresponding acceleration trends so that they can be used as inputs for a FEM analysis.
SiMOD – Multi-robot mobile systems for the manipulation of deformable objects
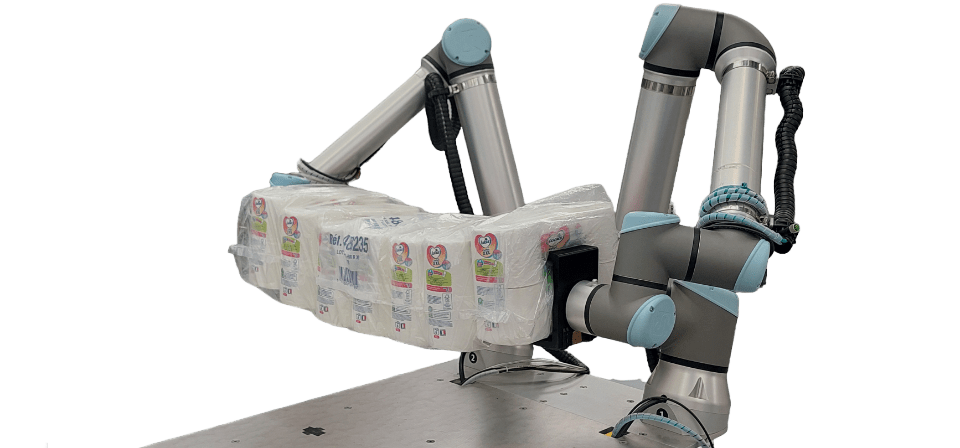
The SiMOD project aims to develop a manipulation framework based on collaborative robots installed on mobile platforms, capable of sensing and co-manipulating deformable objects for industrial applications. The goal is to improve the work experience by reducing the physical and cognitive effort of workers in the manufacturing sector in applications that involve handling deformable objects, such as large soft material packaging, electrical cables, and bulk material bags, therefore not automatable in a flexible way with the technological solutions currently available on the market.
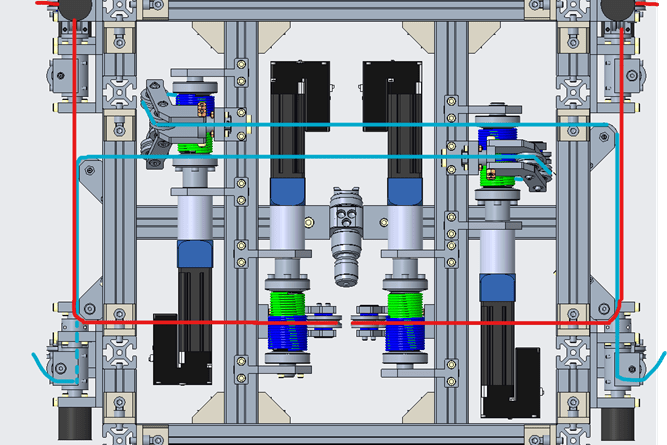
OMNI: An innovative gear transmission for articulated robots

The OMNI project aims to create an innovative transmission for the actuated axes of articulated robots. The most significant features of this kind of robots are the positioning accuracy, the high global stiffness against the requested payload, and the extremely low hysteresis. According to the most used electric motors and angular speed requirements for each axis, high reduction ratios are generally required for this application (up to 160:1). Additional needs coming from the robot market are a high modularity in the motor and speed-reducer combination, as well as improved efficiency in comparison to current transmissions.
Past Projects
We have been involved in industrial projects for many years, and the collaboration with partners has helped us to grow both as people and as a group, gaining experience and skills that can be used to improve the effectiveness and quality of our work.
Here you may find a preview of a few of the most recently concluded project, while the full list of past project can be found by clicking on the button below.
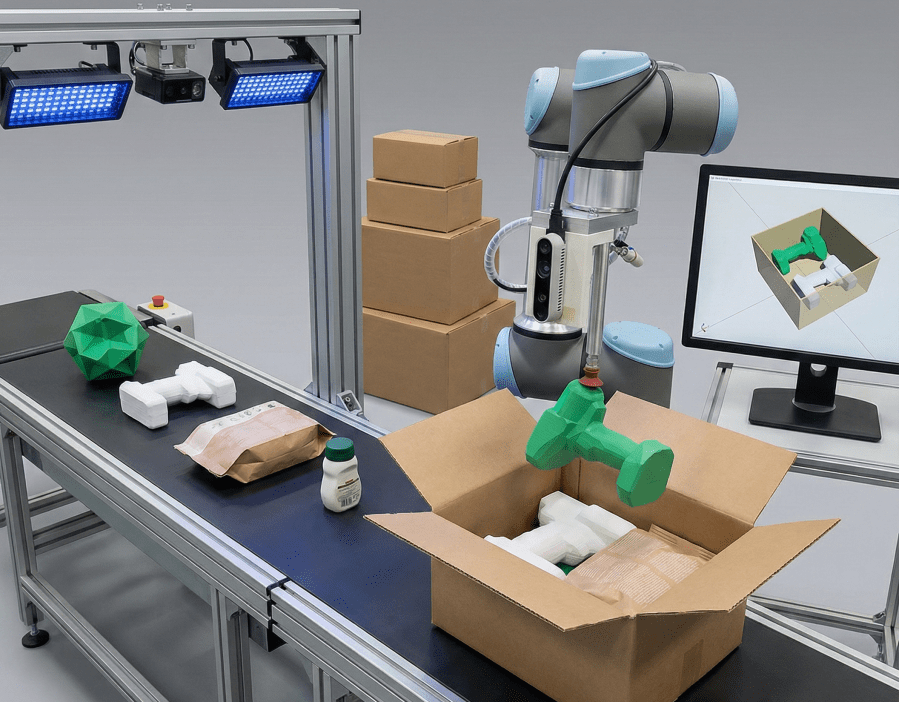
Intelligent systems for automated and optimized packing operations in the e-commerce industry
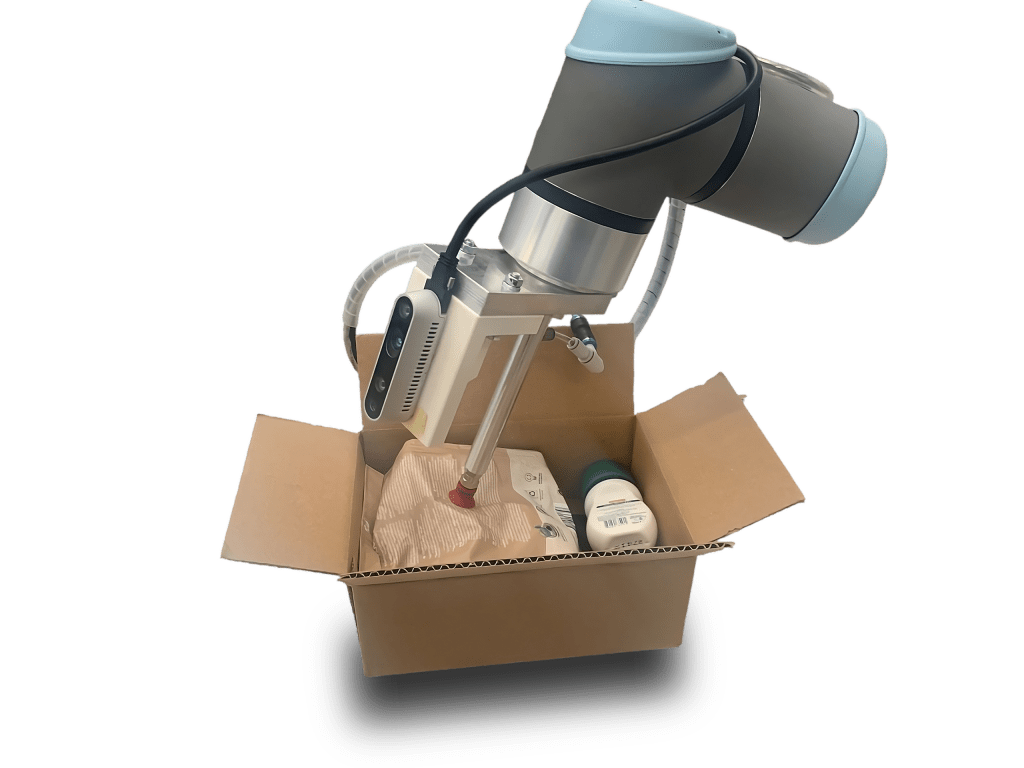
This project aims at automating the task by developing an intelligent system capable of performing the boxing process, employing robots to manipulate and correctly pack the items. The system will integrate robotic tools with state-of-the-art Artificial Intelligence algorithms for Computer Vision, along with Deep-Learning-based strategies for solving 3D bin-packing problems.
Cooperative dual-arm manipulation in highly dynamic applications
The recent advances achieved within the last two decades in the technology constituting manipulators, such as fast actuation and reliable sensing, now allow us to aim for human-like performances in terms of dexterous manipulation. However, serial-link robots are still being shipped with overly simplistic control systems that limit the ability to execute fast movements or intricate manipulations. In this project, we will explore intra-robot cooperation, force control, and path planning to enhance manipulators’ capabilities. Focusing on tasks such as handover and processing during motion.
Robotic devices for pick and place operations assisted by vision systems for the feeding of automatic machines with high dynamics

In automatic machines for packaging, it is often necessary to perform pick-and-place operations. The high productivity required by the packaging industry leads to the necessity to execute these operations in the shortest possible time bringing to the use of parallel manipulators. On the other hand, the robot’s tasks become more complex every day, with manipulators cooperating with sensors and vision systems making it difficult to use parallel manipulators in some situations. This project aims to design a robot capable of executing complex pick-and-place operations (e.g. 3D picking) with very high dynamics.
CoMiR − Extending robotic manipulation capabilities by cooperative mobile and flexible multi-robot systems
The project proposes the development of a a mobile and reconfigurable cable robot, capable of adapting to various industrial manipulation tasks where traditional solutions are limited. The possibility of continuous reconfiguration of the robot opens new problems for the estimation of cable-robot geometric parameters, and in general, its state, posing difficult new challenges.
Electromechanical motion systems for naval and submarine applications
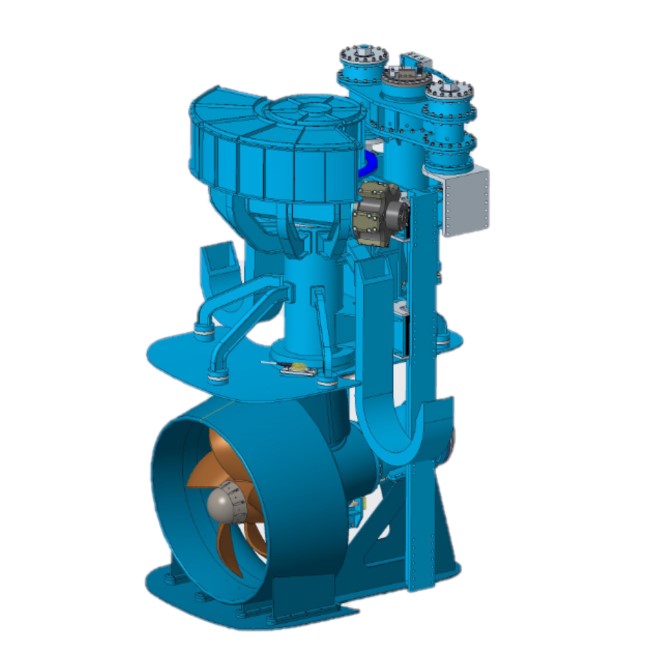
Marine propulsion and handling systems, both for surface ships and submarines, have undergone a profound transformation in recent decades, relating to motion transmission and control. This change leads to a technological transformation to move from predominantly hydraulic mechanisms to electrical implementations. This research project focuses on the study of a new-generation of electromechanical actuation devices, in the perspective of performance maximization and reduced environmental impact.
Cable-driven parallel robots for automatic recovery of cargo in marine applications
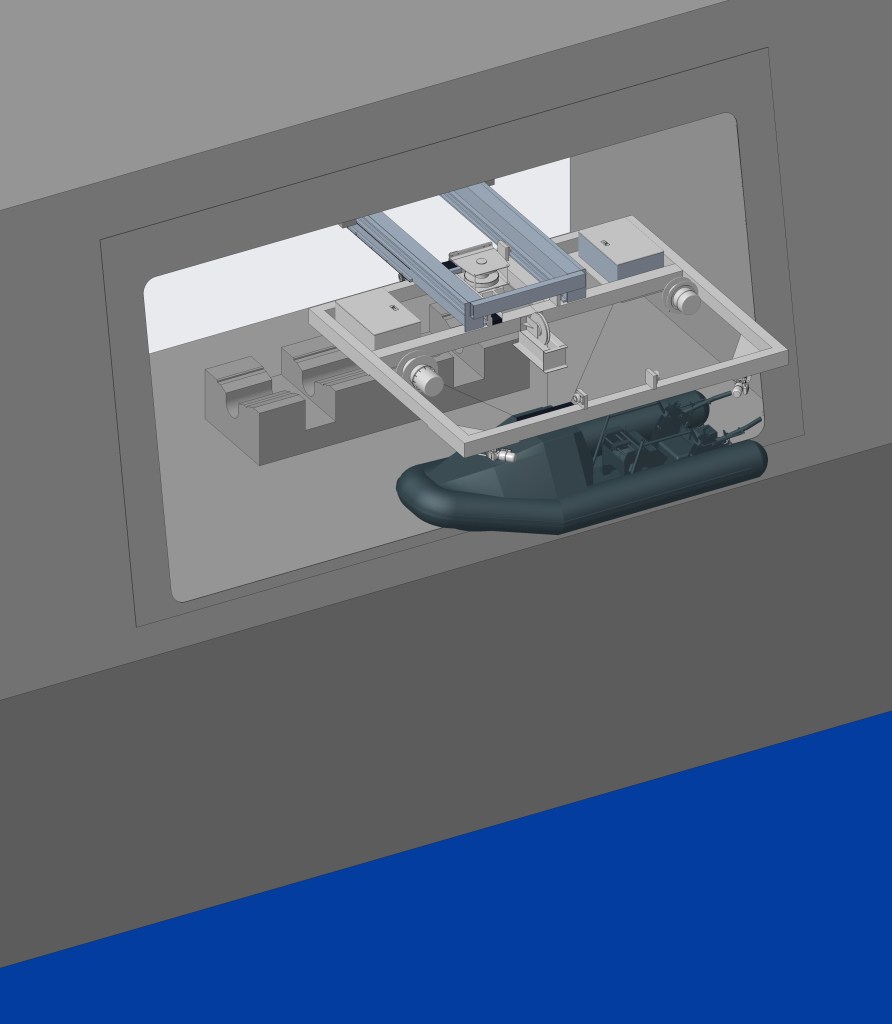
This project focuses on the study of a cable-driven parallel robot (CDPR) for the automated handling of cargo from the side of a ship. Handling operations are performed at sea, under calm to mild weather conditions, thus both the cargo and the ship (on which the robot is installed) may possess oscillatory motions.
ROSSINI

The ROSSINI project aims at designing, developing, and demonstrating a modular and scalable platform for the integration of human-centred robotic technologies in industrial production environments. This will be achieved by developing innovative technological components and methodologies in all fields related to collaborative robotics, and by integrating such components in an open platform ensuring quick ramp-up and easy integration, making Human-Robot Collaboration (HRC) a viable choice for manufacturers.
Development of the electro-mechanical systems of the Sample Fetch Rover for the NASA / ESA Mars Sample Return campaign
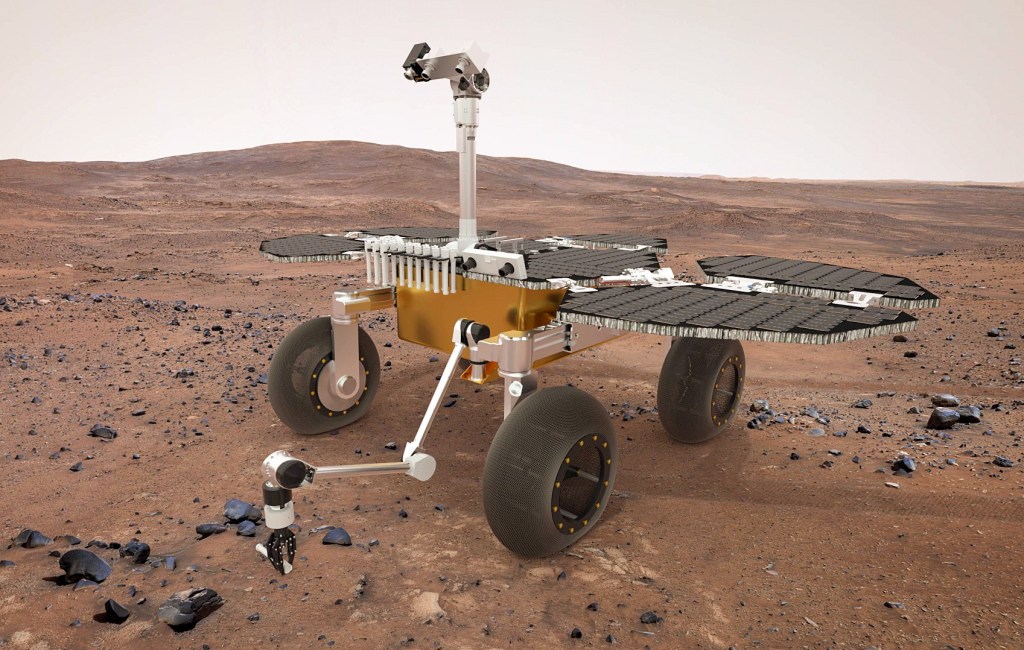
The Mars Sample Return (MSR) campaign is a joint endeavour between the space agencies NASA and ESA, aiming at bringing samples of the Martian surface back to Earth by the early 2030s. The Sample Fetch Rover (SFR) is a key element in this architecture, as it will locate and retrieve the samples previously prepared by the Perseverance rover. The SFR will then deliver the samples to a lander, from which they will be launched into Mars orbit.
COORSA

Since the introduction of the Industry 4.0 concept, process automation through the use of robots has received increasing attention. In the current context, logistics has significantly benefited from this innovation and the growing need for optimization in the transportation of goods has encouraged the use of mobile robots (AMR) in modern storage centres. At the same time, collaborative robots (or cobots) have become very popular in various industrial applications thanks to their safe interaction with humans.
FlexCoBot – Collaborative robotics for advanced, interconnected and flexible manufacturing systems
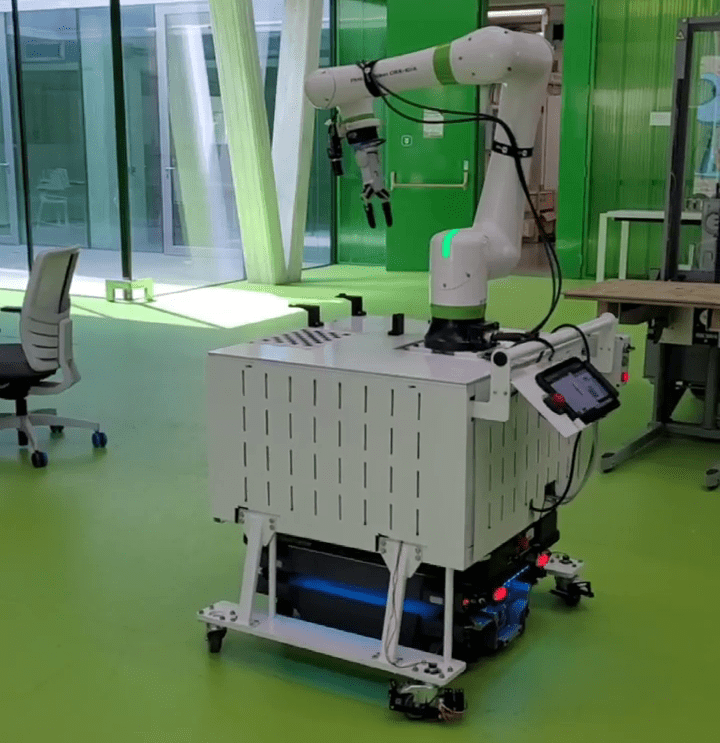
The FlexCoBot project aims at studying and developing an innovative, automatic and flexible manipulation system, based on the combined use of collaborative robots (or cobots), mobile robots (AMR, Autonomous Mobile Robot) and advanced perception systems. This robotic system is meant to fulfil the needs of innovation of modern industries in terms of integration and cooperation between robotic systems and human operators.
Analysis, layout definition, simulations and performance of drivetrain functionalities for PHEV-type hybrid vehicles
In recent years, many industrial sectors are increasingly sensitive to the respect and protection of the environment in which we live. Among these, also the automotive sector is contributing more and more to the goal of minimizing polluting emissions from its products. The strong development of electric mobility in the last decade has led car manufacturers to reverse the trend, combining thermal propulsion with electric propulsion, in extreme cases completely eliminating the former.
Development of advanced mechatronic solutions for additive manufacturing
The project is aimed at the study and implementation of advanced mechatronic systems for the process control of machines for FDM (fused deposition moulding) additive manufacturing. These systems will ensure greater dimensional accuracy and strength of the produced components.
Partners