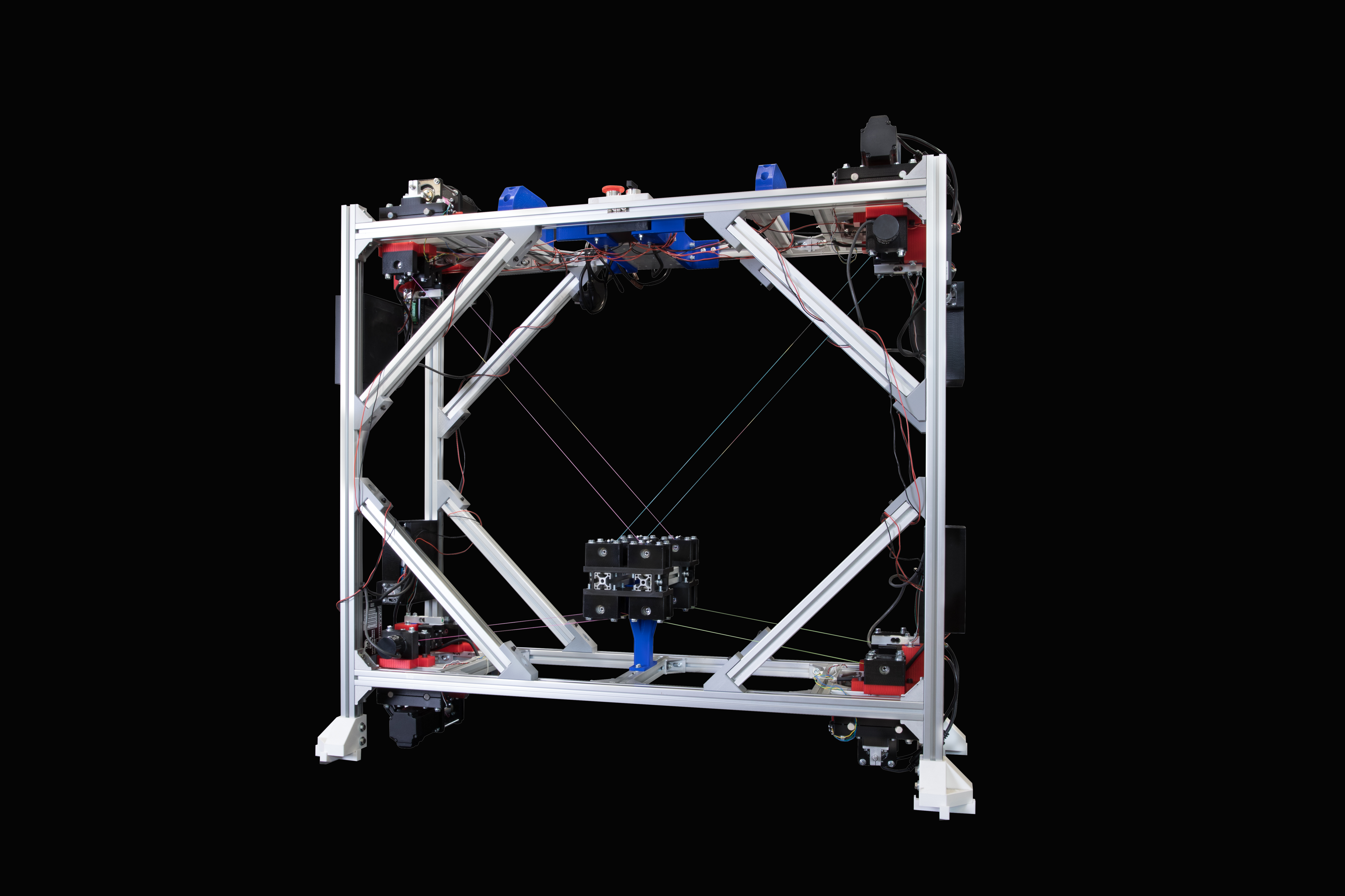
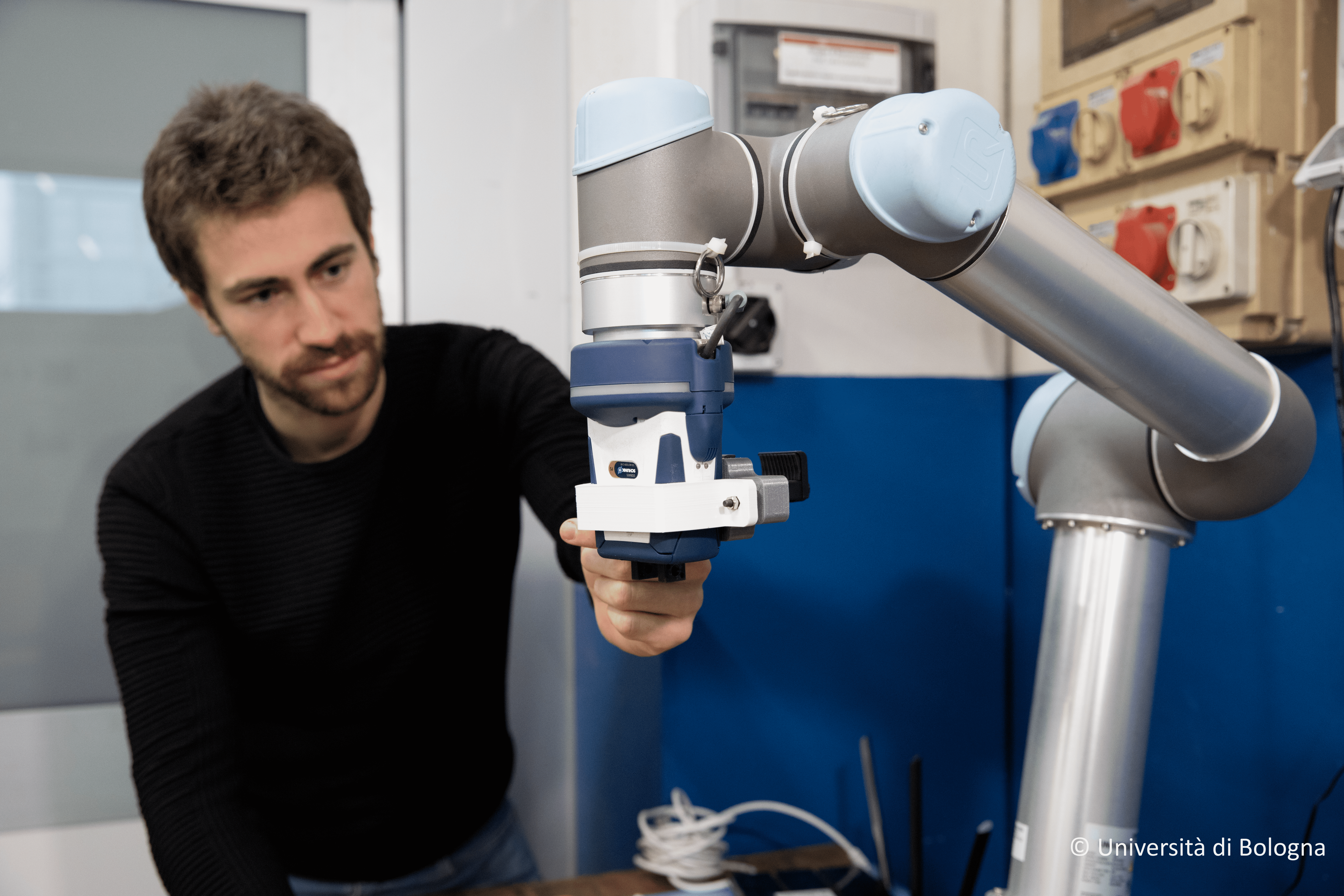
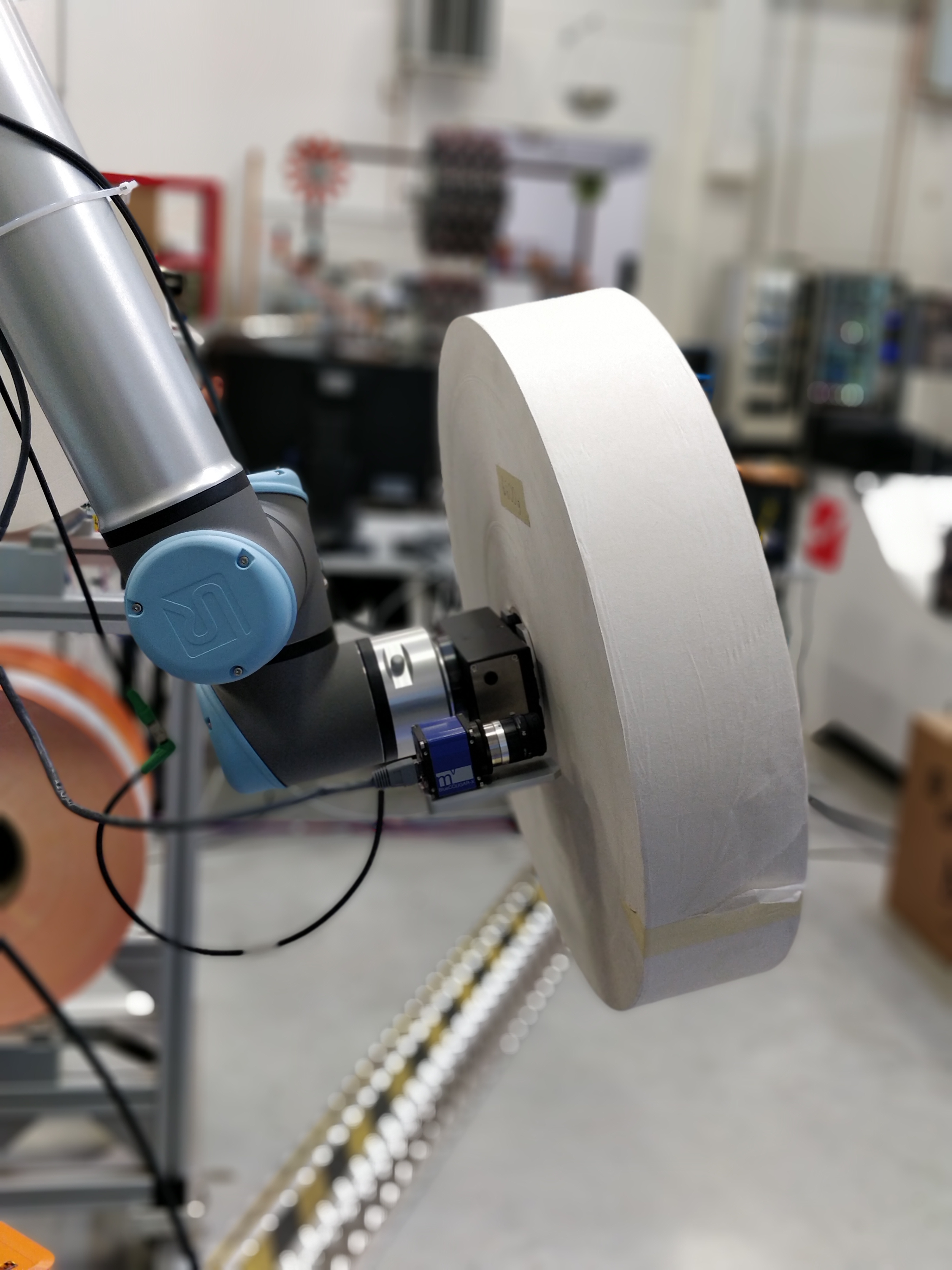
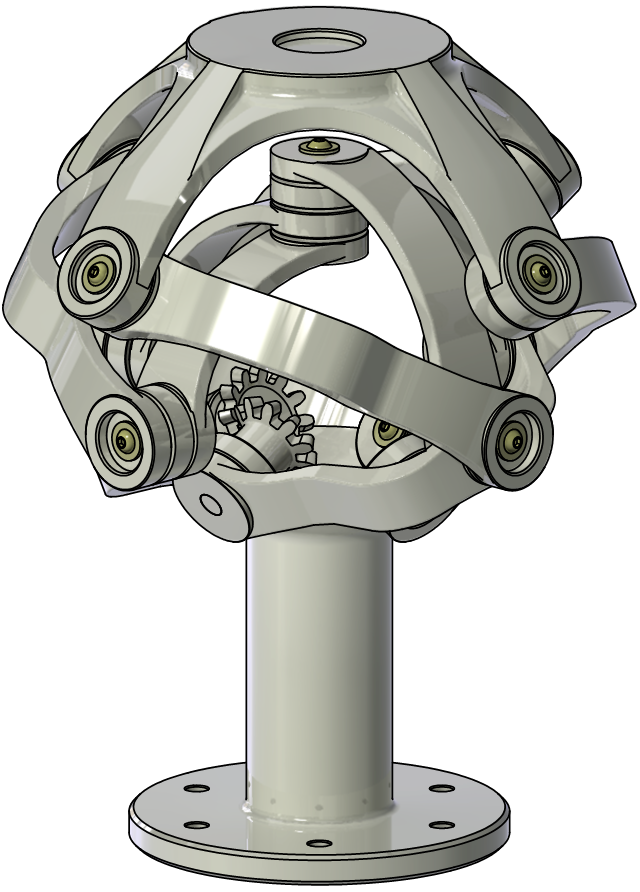
Industrial robotics is a vast field that constantly draws the attention of many companies seeking devices that can help and improve their production and assembly lines. Our group is currently focused on novel, alternative robotic systems, such as cable-driven or parallel robots, but also investigates the potential associated with the use of collaborative robots, which recently became popular and available on the market. On top of that, we are engaged in several research projects, often in collaboration with industrial partners, related to other domains of robotics (such as mobile robots for planetary exploration and vision-assisted robotics) or industrial automation, with a particular interest in the sloshing topic. Finally, our expertise is deeply rooted in theoretical kinematics and mechanism design.
Find here our publications related to the aforementioned topics and the open-source software we implemented so far.

Follow our activities!














Publications
Below is the complete list of works supervised by Prof. Carricato and Dr. Idà, faculty members of the group.
Open Source Software
Please refer to our GitHub page to find repositories of open-source software we implemented throughout our projects.
