Since 2009, our research team has acquired experience in the analysis, design and control of Cable-Driven Parallel Robots (CDPRs). We successfully developed three prototypes, and we have recently approached the field of aerial parallel robots, focusing on so-called Aerial Cable Towed Systems (ACTSs).
Cable-Driven Parallel Robots
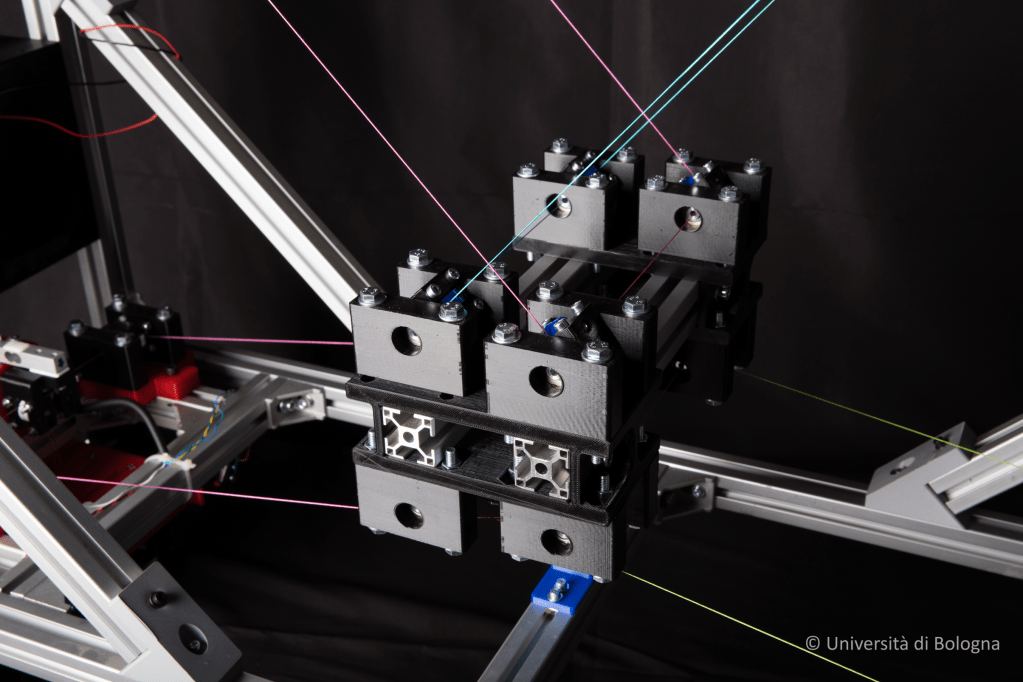
Cable-Driven Parallel Robots (CDPRs) are a class of parallel robots where the end-effector (or moving platform) is actuated by extensible cables that can be coiled and uncoiled on servo-controlled winches and routed through pulleys. They can effectively work like multiple coordinated cranes connected in parallel. Servo-winches can be installed nearly everywhere, and several meters of flexible cables can be coiled onto them to match application requirements. Since thin cables can withstand hundreds of kilograms, using multiple cables allows the robot to employ lighter structures and smaller motors. CNC software lets the coordinated cables move the end-effector rapidly and accurately toward the target without the need for human assistance.
Our Expertise
A robust theoretical approach is employed to translate application constraints into both software and hardware design requirements.
Mechanical Design
- servo-winches with integrated electronics for feedback and safety purposes;
- smart pulley systems for flexible installation and use;
- application-wise end-effectors and sensors.
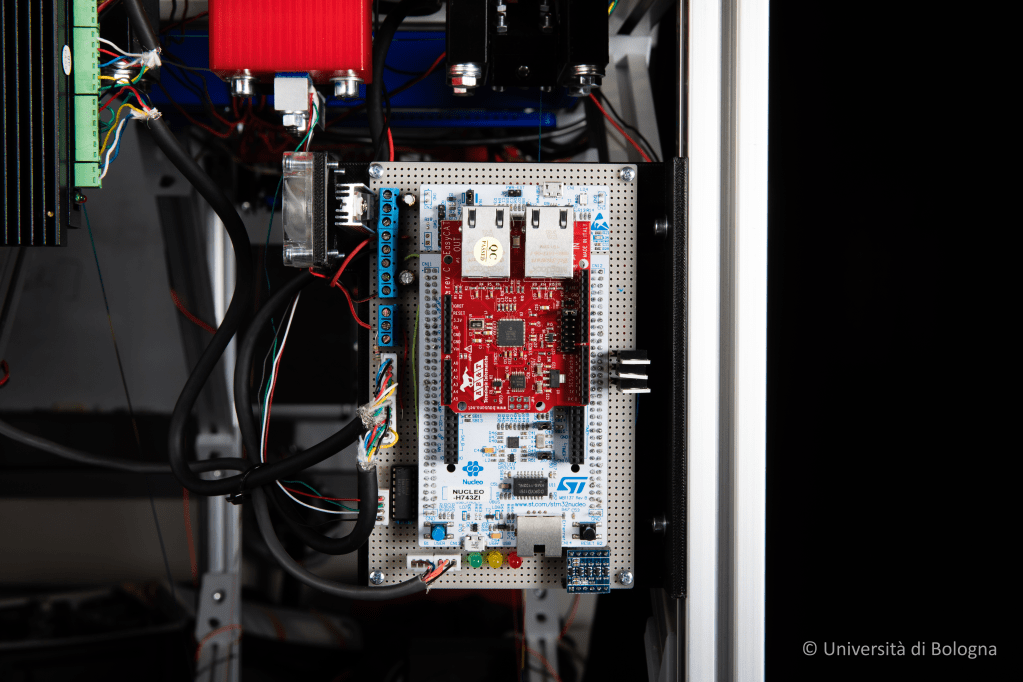
Software Programming
- high-level real-time software for machine control in industrial applications (PLCs, IPCs);
- low-level real-time software for embedded deployable applications (winch drives and embedded CDPR microcontrollers);
- Graphical User Interfaces (GUIs) for user interaction.

Applications
CDPRs attracted attention from industry and academia and have been proposed to be used in an extensive range of applications thanks to their features: large workspace, high payload capability, high speed compared to rigid-link manipulators of the same size, and the possibility of adaptation to the surrounding environment.
The following is a list of possible applications where this cutting-edge technology was employed:
- large-scale additive manufacturing
- rescue systems
- port container handling
- radio sensor carriers
- ship and bridge building
- contour crafting
- storage retrieval
- facade window cleaning units
- motion simulation
- assisting devices for disabled people
- aerial shooting
- optical reflectors
- warehouse material handling
- haptic interfaces
- space robotics
- CNC machine tools
- rehabilitation devices
Find below a list of industrial projects in this context to which our lab contributed:
- Cable-driven parallel robots for automatic recovery of cargo in marine applications, in collaboration with Calzoni Srl (in progress);
- Cable-driven parallel devices for 3D laser scan systems, in collaboration with GREEN LINE, 2017;
- Intelligent cable-driven robots (ICABOT): an adaptive approach to robot design and control, PRIN2012 Project, 2015-2018.
Prototypes
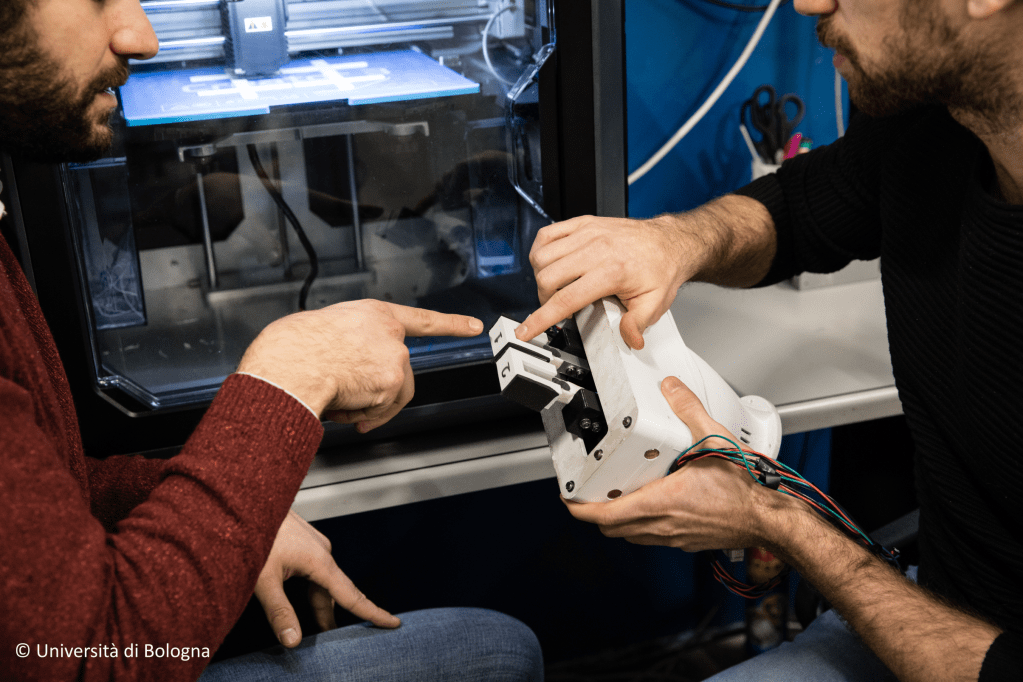

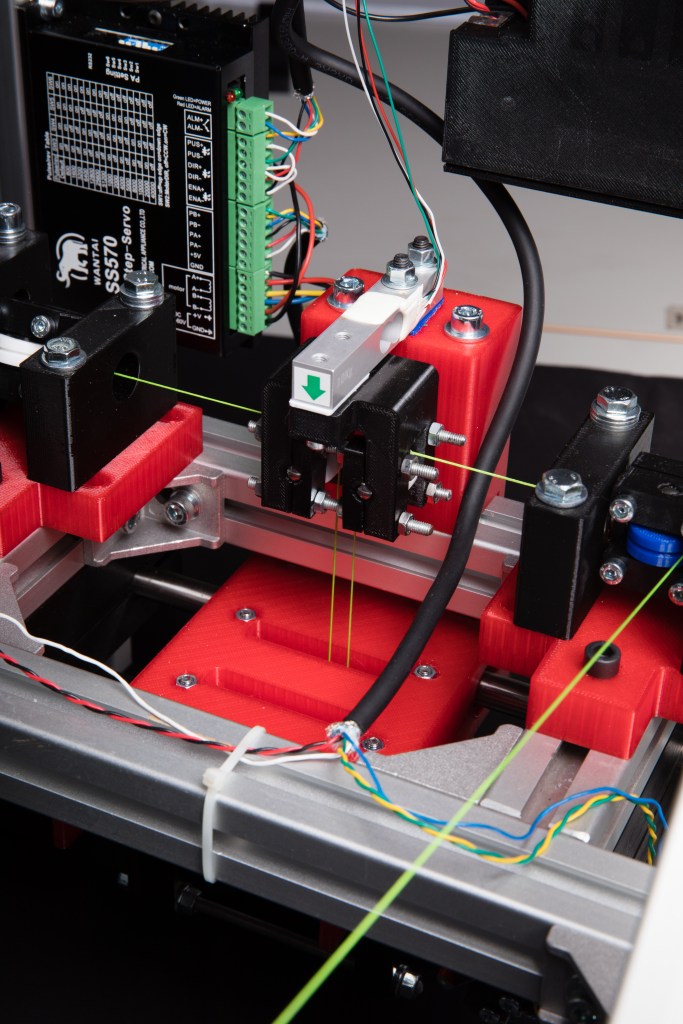
Thanks to a well-equipped electronic lab and leveraging the fast prototyping capabilities of the 3D printers at our disposal, we can develop original cable-driven robots from scratch, starting from the mechanical design up to actuation and sensorization.

Research Platform
This prototype is a reconfigurable cable-driven parallel robot with a cubic workspace of 2m x 2m x 2m and a total installed power of 6 KW.
Mainly used for studying under-actuated systems, this prototype was engineered in-house by our students and PhD candidates.
Laser Scanner
This is a fully deployable laser scanner composed of a fixed high-end laser distance-measuring device, whose laser beam is reflected by an optical mirror mounted on the moving platform of a suspended CDPR.
The platform can automatically fold itself to access fuel storage tanks to reconstruct their shape and volume. This prototype was designed and built in collaboration with Greenline s.r.l. and Te.S.I. s.r.l.


Laser Engraver
This is a patented prototype of a redundantly-actuated CDPR with a planar configuration for laser engraving.
Initially developed within a Master-thesis project, it is now the subject of further studying and improvement by our team and students. Thanks to its inherent scalability and light-weight, we aim to industrialise this device for practical use in real-case scenarios.
Aerial Parallel Robots
Aerial Cable Towed Systems (ACTSs) consist of several Unmanned Aerial Vehicles (UAVs), such as multi-rotor drones, connected to a payload through cables. They combine the motion ability of UAVs with the high versatility of classical cable-driven parallel robots. Multi-quadrotor collaboration makes it possible to overcome the main drawback of individual drones: scarce scalability in size and available payload. Cables allow flexibility of use, lower costs, and low inertia forces to be managed.
Nowadays, the interest in ACTSs is increasing due to their potential to operate beyond the visual line of sight with a high level of autonomy. Search, and Rescue (S&R) missions, transportation and manipulation of heavy loads and autonomous inspections in dangerous environments are only a few applications that encourage researchers to develop new technical solutions.
