
Abstract
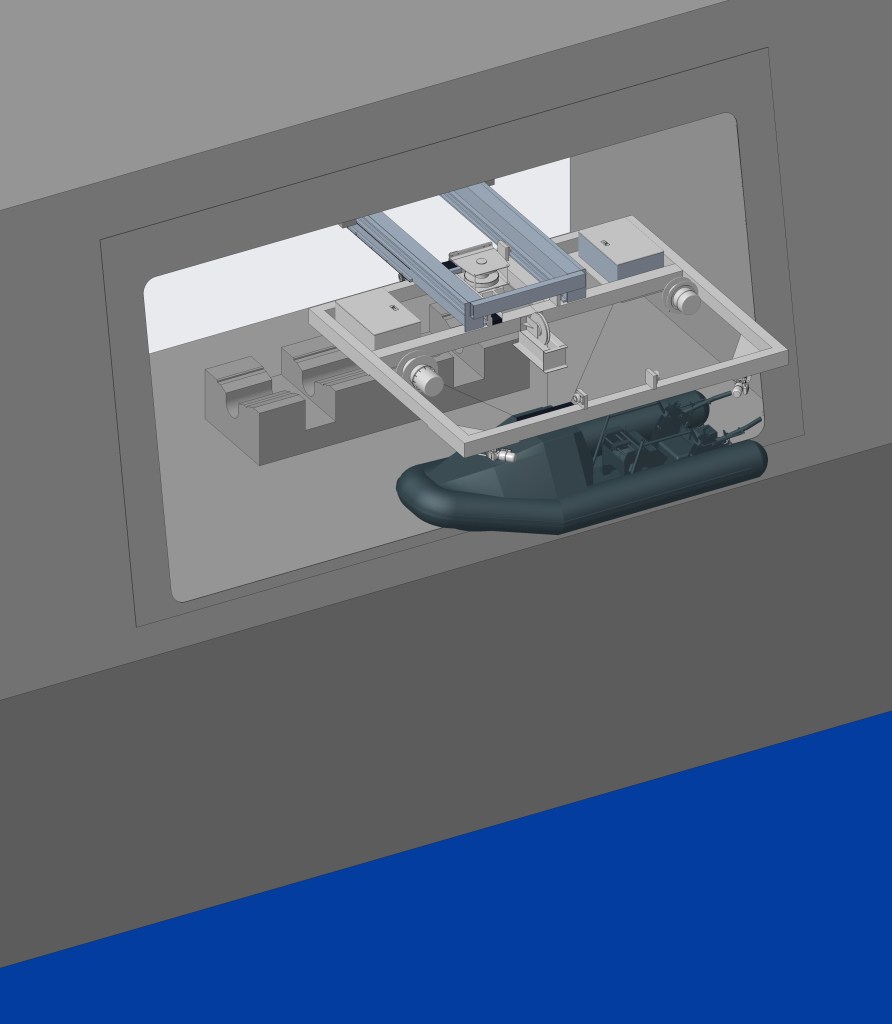
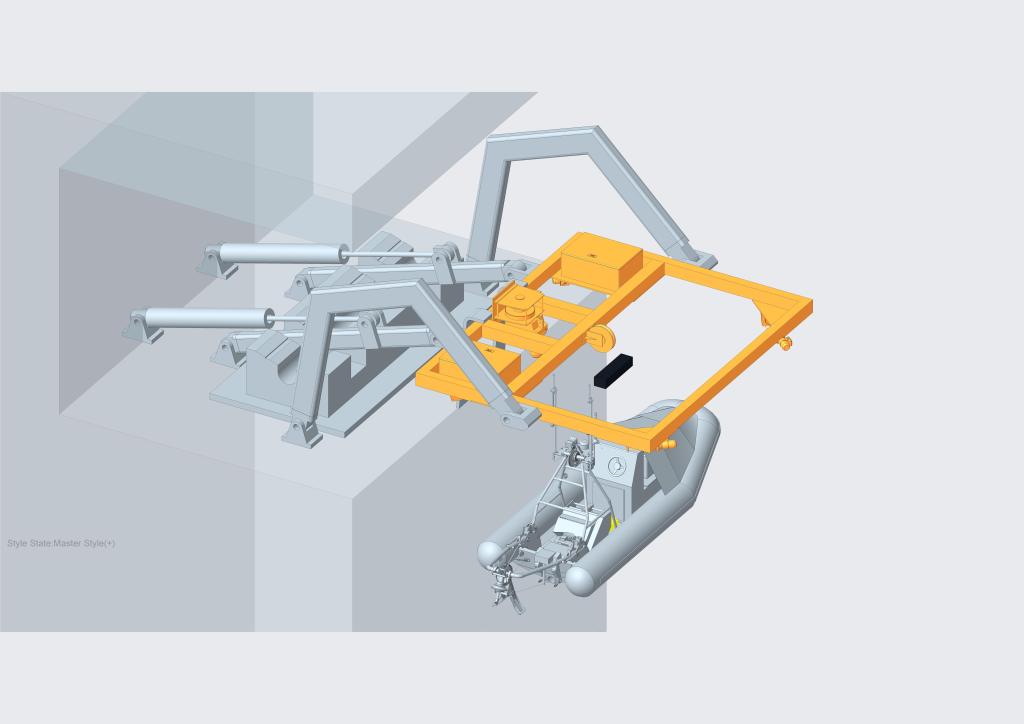
This project focuses on the study of a cable-driven parallel robot (CDPR) for the automated handling of cargo from the side of a ship. Handling operations are performed at sea, under calm to mild weather conditions, thus both the cargo and the ship (on which the robot is installed) may possess oscillatory motions. The specific tasks considered in this project are (i) cargo tracking and picking on the sea surface, (ii) cargo lifting. Such operations are commonly carried out by standard cranes, operated and assisted by specialized workforce. The cable-driven parallel robot acts as multiple, fast, and coordinated cranes, concurring in the manipulation of the cargo. Multiple cables can (i) dexterously manipulate the picking apparatus, mounted on the robot end-effector, so that the cargo can be dynamically captured while floating at sea level, and (ii) avoid or drastically limit cargo oscillations during lifting operations.
Project Goals
This project aims at:
- identification of the optimal robot architecture for the required handling operations;
- design of the robot control system: the CDPR must have the necessary tracking abilities to pick up cargo on the sea surface, and should actively damp cargo oscillations during lifting;
- dynamic simulation of the system and preliminary experimentation on a prototype.
In collaboration with: Calzoni Srl
Do you want to know more about this project? Send us a message!



This sounds like an innovative solution for handling cargo at sea.
LikeLike