Index
Industrial Context
European industry is currently engaged in several challenges. First of all, re-shoring of production facilities has become a new important target to be competitive on the world markets. At the same time, ageing of workforce poses a challenge for health and safety in our countries, where a great deal of effort is now put into finding new ways to relieve people from repetitive, alienating and strenuous jobs.
In this context, human-robot collaboration can be seen as a practical sustain to support production and make European manufacturing economically viable. It can also extend human capabilities, leaving the operators in charge of more complex tasks, where experience and creativity can assume predominant importance.
Typically, industrial robots are used for repetitive tasks in a fixed working cell and the entire system is hardly reconfigurable. On the contrary, collaborative robots, or cobots, with their low installation cost and a high degree of flexibility, become versatile systems that can be set up-and-running in limited time. Additionally, and more importantly, their intrinsic safety-related features remove (or reduce) the need for protective fences, resulting in a negligible impact on the factory layout, without considering the significant potential in sharing a working environment with human operators. Moreover, cobots may be installed on top of an autonomous mobile platform, able to safely navigate in unstructured environments, and allowing the robotic system to transport material and serve multiple tasks/machines at once.



Robot vs Cobot
“An apparatus and method for direct physical interaction between a person and a general purpose manipulator controlled by a computer.”
1997 US Patent 5,952,796
Differently from the industrial robot, where interaction with humans is severely prohibited and prevented by protective barriers, collaborative robot are purposely designed to share the same workspace with human operators, under some limitations:
- the operator must have full control of the robot;
- in case of vicinity or interaction, speed and force exerted by the robot must be limited (or zeroed) by suitable sensors or other means.
European directives and standards are legislative instruments that guarantee the protection of people’s health at the workplace, and possibly that of the environment too. EU directives establish the essential safety requirements, while technical standards indicate the recommended solutions to achieve them. The scheme below shows the main standards and directives related to the safety of people working in environments with robots that perform collaborative operations, namely operations where the human operator is allowed to enter a monitored shared workspace and possibly interact with the robot.

In particular, ISO 10218-1/2 define four types of collaborative operations that are allowed:
- safety-related monitored stop: the robot motion ceases before an operator enters the collaborative workspace and autonomously resumes once the operator has exited;
- hand guiding: the operator uses a hand-operated device to transmit motion commands to the robot system;
- speed and distance monitoring: the robot system and operator may concurrently move in the collaborative workspace, while always maintaining a protective separation distance;
- power and force limiting: physical contact between the robot system and an operator can occur either intentionally or unintentionally. Risk reduction is achieved, either through inherently safe means in the robot or through a safety-related control system.
ISO/TS 15066, which is not a norm but a Technical Specification, analyse in further details the safety and efficiency of these operations, introducing the concept of dynamically changing thresholds, such as minimum safety distances or impact forces.
In general, using a collaborative robot does not make an application collaborative! It is important to remember that even if every single robot and component satisfies safety requirements, the risk assessment must be always carried out considering the whole application and context.
Our Goal
The main focus of our research group is the development and study of high-level, sophisticated applications that leverage this kind of technology. To this purpose, we resort to market-available appliances, such as collaborative robotic arms, autonomous mobile platforms or collaborative grippers, and test their capabilities and limitation by comparing different control methodologies, starting from industrial programming standards up to ROS-based open-source packages.
Investigated topics include, among the others, computer-vision-based applications to move and manipulate objects in unstructured environments, co-manipulation, smart material transportation and management (palletizing, loading, disposal, etc..) and support to assembly lines.
Our activities are often carried out in collaboration with industrial partners interested in evaluating new options to improve their productivity. Find below an up-to-date list of projects in this context:
- ROSSINI, in collaboration with IMA S.p.A. – R&I dept, 2021-2023;
- FlexCobot, in collaboration with Bi–Rex Competence Center, 2020-2021;
- COORSA, in collaboration with Por-Fesr Emilia – Romagna 2014/2020.


Equipment


Lab Cobots
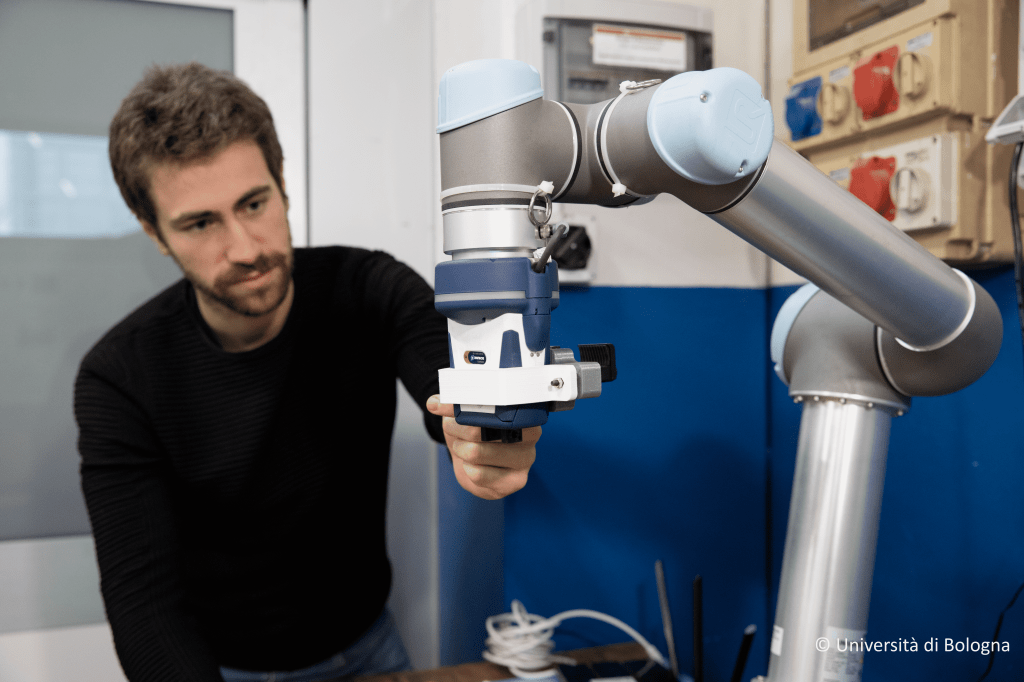
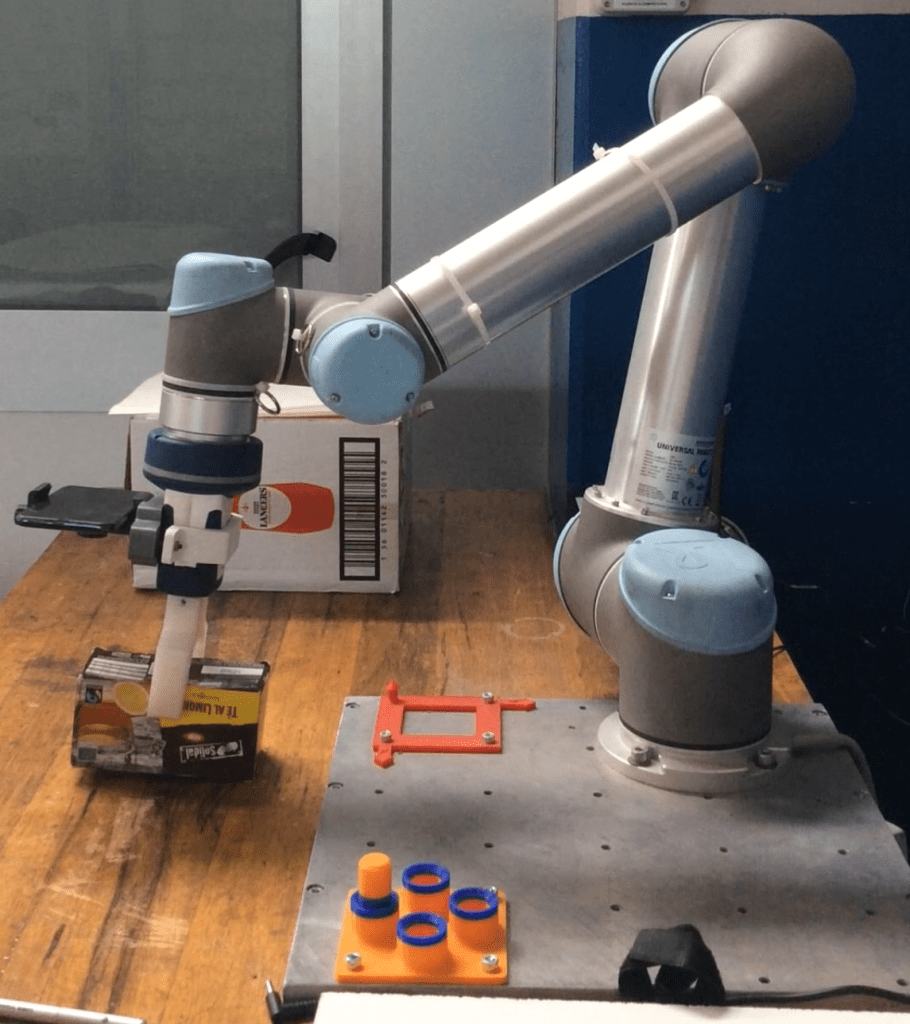
Universal Robots UR5 and UR5e are the collaborative robots used at our lab for exploring and testing high-level application with an industrial solution available on the market.
The UR5 arm is equipped with a collaborative electrical gripper by Schunk with 3D-printed fingers and a force/torque sensor by Nordbo Robotics mounted at the wrist to measure wrenches exchanged with the external environment. The UR5e, instead, comes with an integrated force/torque sensor inserted in its terminal joint, so it is only provided with a cordless suction gripper. Both arms can be additionally equipped with a custom 3D-printed support for a generic smartphone to provide sight to the robotic system and implement standard vision-based applications.
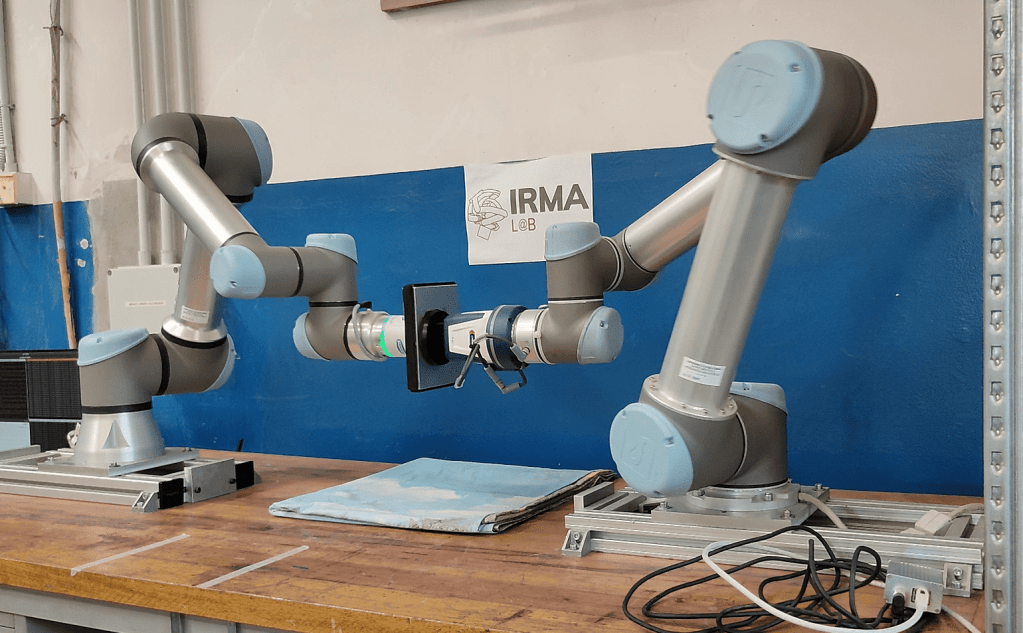
Another point of our research is to test and compare different types of external control, including ROS-based one, to attain a complex task that cannot be achieved with standard industrial robot programming.
Moreover, thanks to a centralized control deployed on a high-performance PC we are able to test and develop co-manipulation tasks as well as AI-based techniques, such as motion control by reinforcement learning.
ROSSINI Platform
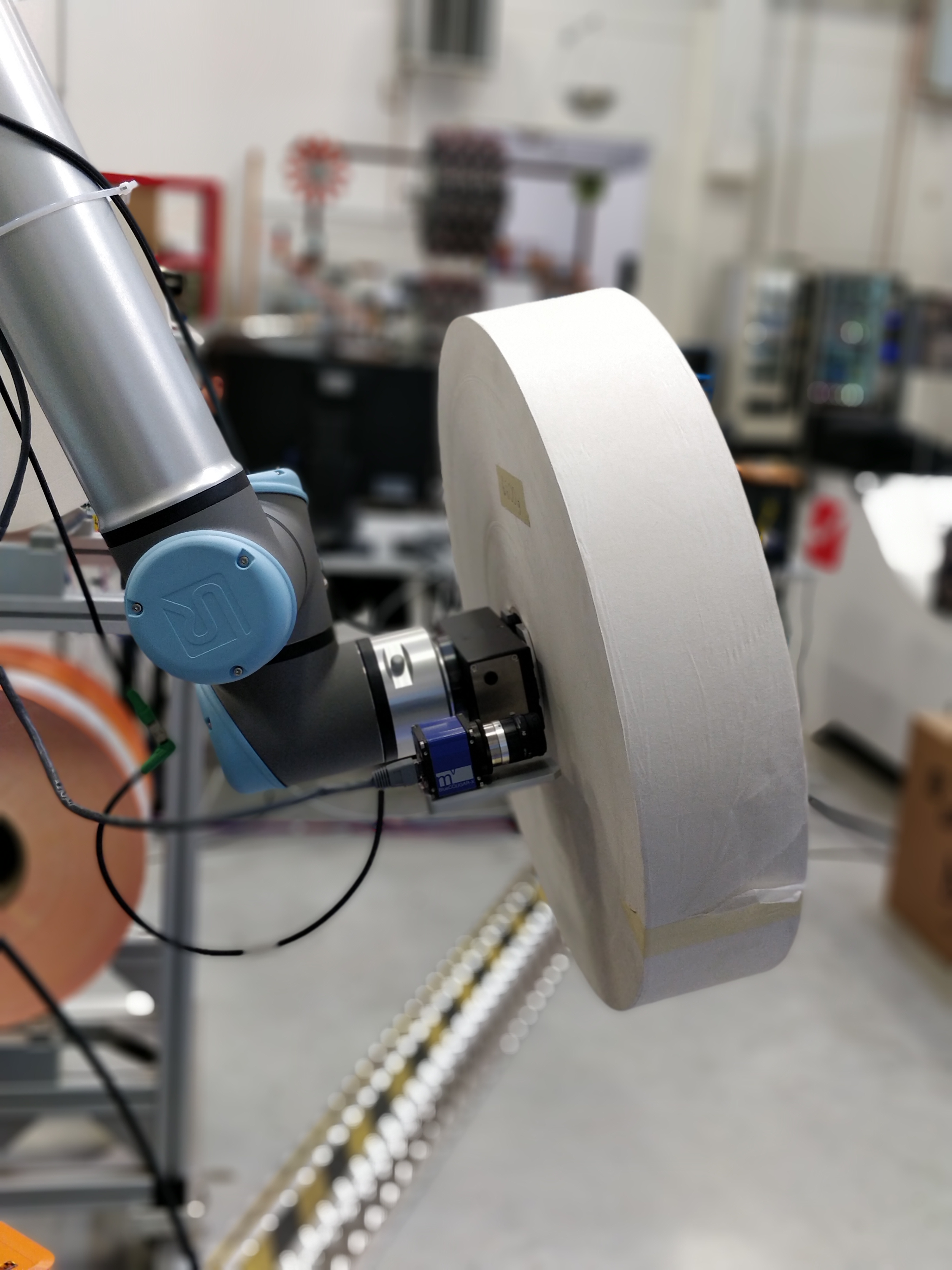
The ROSSINI platform is an integrated robotic system engineered in collaboration with IMA S.p.A.-R&I dept. to carry out machine-tending tasks within the shop-floor of packaging-machine users, composed by:
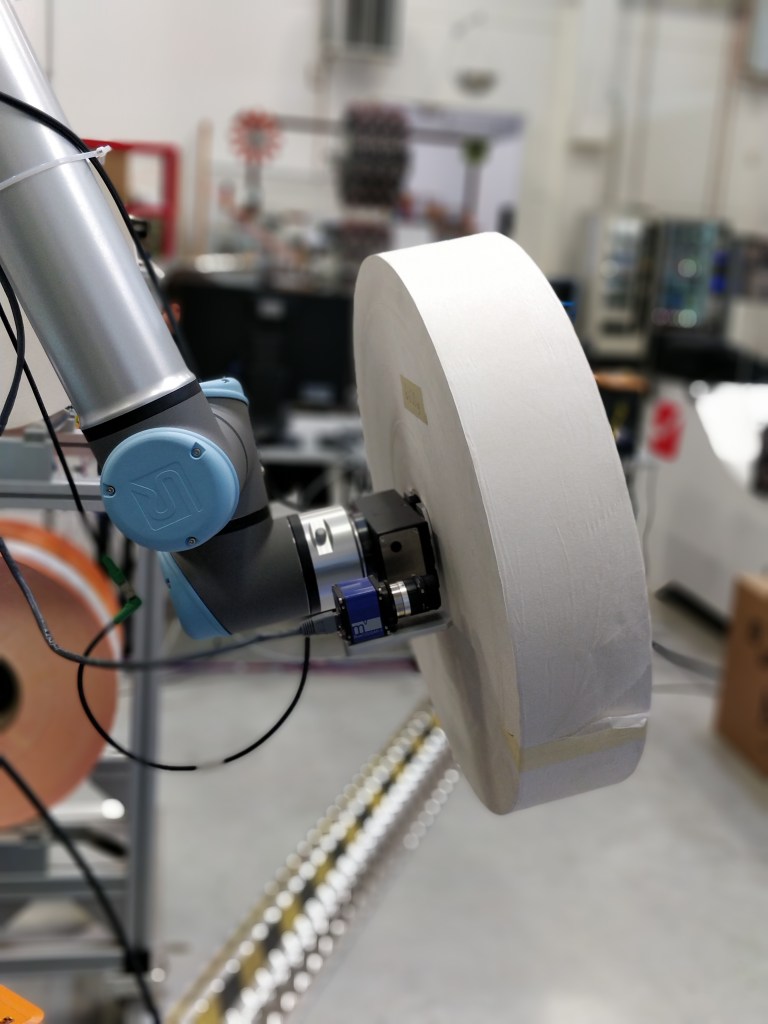
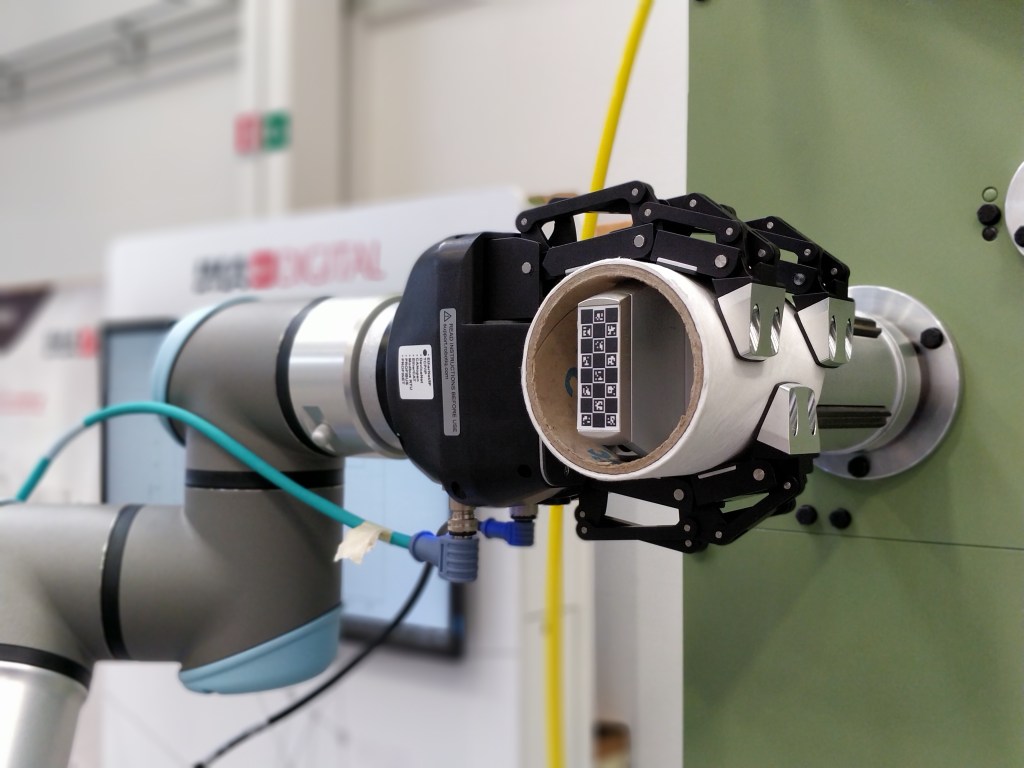
- two UR10e by Universal Robots collaborative robots; the former mounts a 3-finger adaptive gripper by Robotiq to take care of light and sophisticated manipulations, whereas the latter is equipped with an industrial 2D camera and an electrical gripper by Zimmer, and is in charge of inspection/detection tasks and heavy-reel manipulation;
- one MiR500 by MiR, a mobile platform with 500 kg of payload and an advanced navigation system that allows this vehicle not only to orient itself in a mapped environment, but also to safely halt whenever an unexpected object appears too close;
- one workstation (i.e. industrial PC) in charge of all vision-related computations, as well as the management of the camera signals and advanced communication with both the URs and the MiR platform;
- a group of safety PLCs and relays that take care of parsing and distributing emergency signals among all components of the system.
This robotic system is currently used within the ROSSINI project.

Bi-Rex Cobots
At Bi-Rex Competence Center we are working on a projects of mobile collaborative robotics, FlexCoBot. The hardware provided by Bi-Rex consists of:
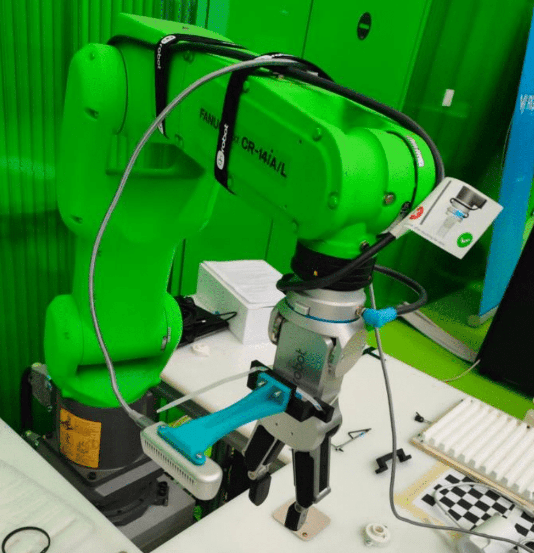
- one Fanuc CR-14iA/L with a payload of 14 kg, this cobot belongs to the first generation of collaborative robots of Fanuc family. It is equipped with a collaborative gripper provided by Schunk and is in charge of assembling and packaging tasks.
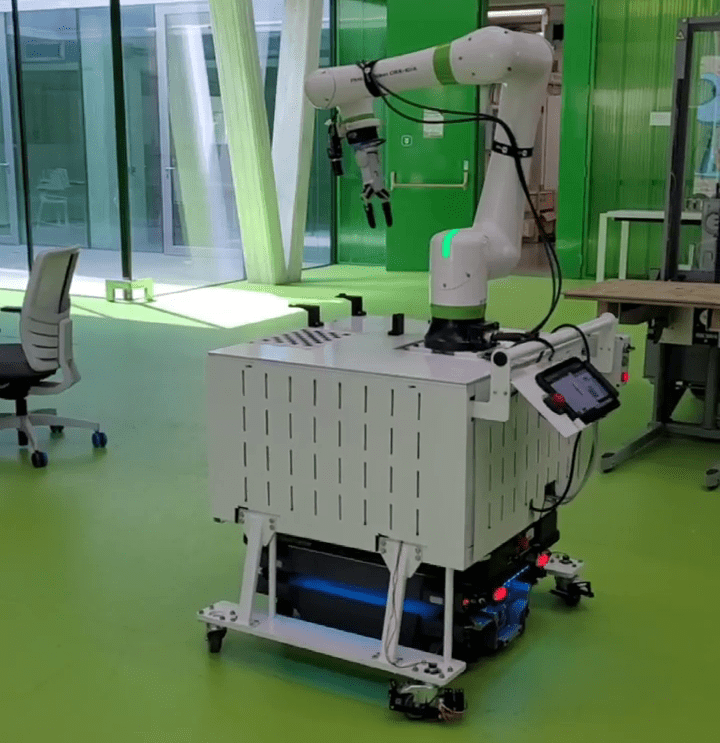
- one Fanuc CRX-10iA/L with a payload of 10 kg, belongs to the last generation of collaborative robots of Fanuc family. It can rely on better sensors and more sophisticated control techniques. It is equipped with a collaborative gripper provided by OnRobot and is in charge of handling and logistic tasks.
- one MiR 250 autonomous mobile robot with 250 kg of payload capacity. Thanks to 3D cameras, laser and proximity sensors, it can avoid obstacle and human operators by maintaining a high level of safety. It is in charge of logistics tasks such as bringing component, from one area to another of the working environment.
