Abstract
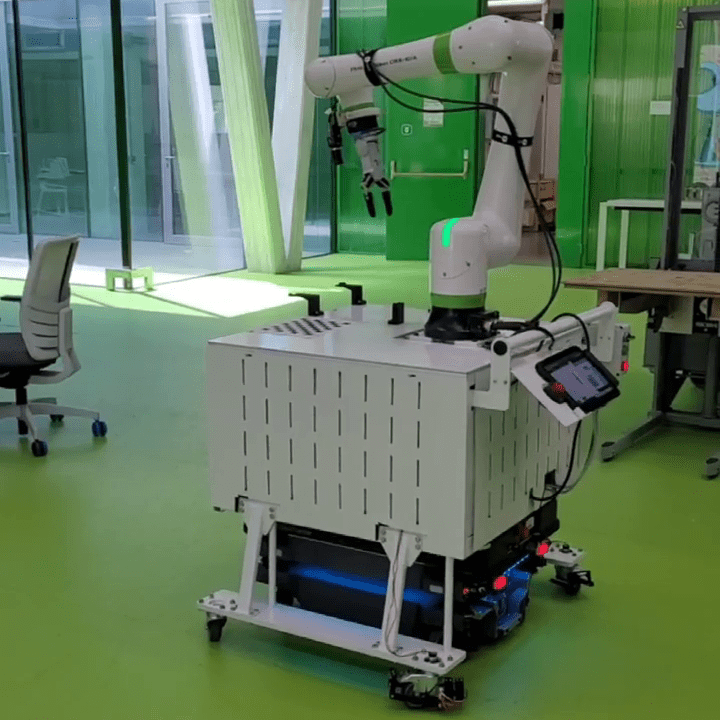
The FlexCoBot project aims at the study and the development of an innovative, automatic and flexible manipulation system, based on the combined use of collaborative robots (cobots), mobile robots (AMR Autonomous Mobile Robot) and advanced perception system. This robotic system is meant to fulfil the needs of innovation of modern industries in terms of integration and cooperation between robotic systems and human operators. FlexCobot project proposes a robotic solution able to increase the competitiveness of modern industries by innovating and improving production processes.
Project Goals
The main goals of the FlexCoBot project are:
- development of a collaborative mobile manipulator able to perform logistic and assembling tasks; the mobile robot (AMR) and the collaborative robot (cobot) can work as a single robotic system or as two different entities; to this purpose, it is necessary a suitable coupling and decoupling system;
- study and development of advanced control techniques for safe interaction with human operators;
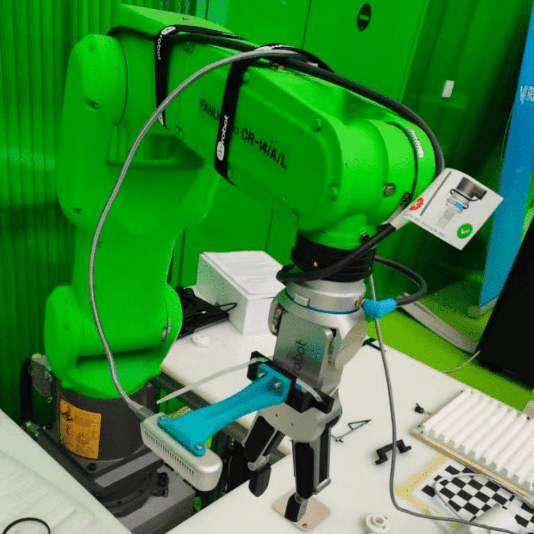
- study and development of advanced perception algorithms, in terms of computer vision and artificial intelligence (AI), to perform automatic objects and/or human recognition.
- development of augmented reality (AR) system in order to assist the human operator, in terms of easing his taks and increasing his quality of work.
In collaboration with: Bi–Rex Competence Center.
Do you want to know more about this project? Send us a message!


