
Abstract
Since the introduction of the Industry 4.0 concept, process automation through the use of robots has received increasing attention. In the current context, logistics has significantly benefited from this innovation and the growing need for optimization in the transportation of goods has encouraged the use of mobile robots (AMR) in modern storage centres. At the same time, collaborative robots (cobots) have become very popular in various industrial applications thanks to their safe interaction with humans. In this project (named COORSA), an innovative solution is proposed in which AMR and collaborative robots are integrated to perform palletizing and depalletizing tasks within a warehouse. Unlike other existing solutions, the products are not lifted by the robotic arm but they are dragged, thus ensuring a reduction of robot size and payload, which is a crucial benefit in mobile collaborative applications.
Project Goals
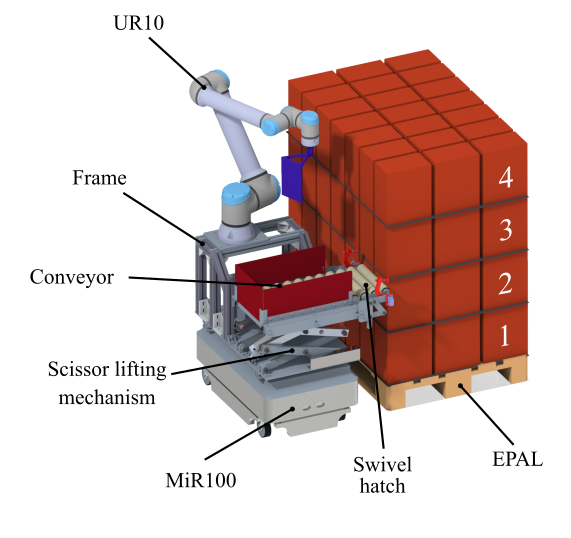
The goals of the project are to develop and validate a prototype of for robotic manipulation in shared environments with human operators. Specifically, the prototype (called P-COORSA) will consist of a mobile platform, a robotic arm, a manipulation organ and a set of sensors capable of analysing different operational scenarios. The robot will therefore be able to perform handling, support and positioning of objects and at the same time it will be able to locate itself within the infrastructure and navigate autonomously.
Related Works
For even more details, please visit the official page of the project: https://www.coorsa.it/
The following scientific papers were published upon the results achieved in this project by members of our research group:
- Baldassarri, A., Innero, G., Di Leva, R., Palli, G. and Carricato, M. 2020. Development of a mobile robotized system for palletizing applications. 25th IEEE Int. Conference on Emerging Technologies and Factory Automation (ETFA 2020), Vienna, Austria, pp. 395-401, doi: 10.1109/ETFA46521.2020.9212124.
- Aleotti, J., Baldassarri, A., Bonfè, M., Carricato, M., Chiaravalli, D., Di Leva, R., Fantuzzi, C., Farsoni, S., Innero, G., Lodi Rizzini, D., Melchiorri, C., Monica, R., Palli, G., Rizzi, J., Sabattini, L., Sampietro, G., Zaccaria, F. 2021. Toward Future Automatic Warehouses: An Autonomous Depalletizing System Based on Mobile Manipulation and 3D Perception. Applied Science, 11, 5959, doi: https://doi.org/10.3390/app11135959.
- Zaccaria, F., Baldassarri, A., Palli, G., and Carricato, M. 2021. A Mobile Robotized System for Depalletizing Applications: Design and Experimentation. IEEE Access, vol. 9, pp. 96682-96691, doi: 10.1109/ACCESS.2021.3092580.
In collaboration with:
Por-Fesr Emilia – Romagna 2014/2020 – CRIT

Do you want to know more about this project? Send us a message!


