
Abstract
The ROSSINI (RObot enhanced SenSing, INtelligence and actuation to Improve job quality in manufacturing) EU project aims to create an innovative platform that is intrinsically safe and can be used for collaborative applications in the manufacturing industry. This will be achieved by developing innovative technological components and methodologies in all fields related to collaborative robotics (sensing, control, actuation, human aspects, risk assessment methodology) and by integrating such features in an open platform, ensuring quick ramp-up and easy integration, making Human-Robot Collaboration (HRC) a viable choice for manufacturers.
IMA Research & Innovation use-case
IMA R&I use case is one of the three real-case scenarios where ROSSINI wants to deploy its HRC system. In this context, the target is an autonomous mobile robot for flexible, collaborative raw-material-reel handling and loading onto an automatic tea-packaging machine.
The robot is composed of the following:
– an Autonomous Mobile Vehicle (AGV) capable of autonomously navigating and moving around the work cell safely and dynamically, avoiding any obstacles;
– two serial collaborative robots with 10Kg of payload and 1.3 m reach;
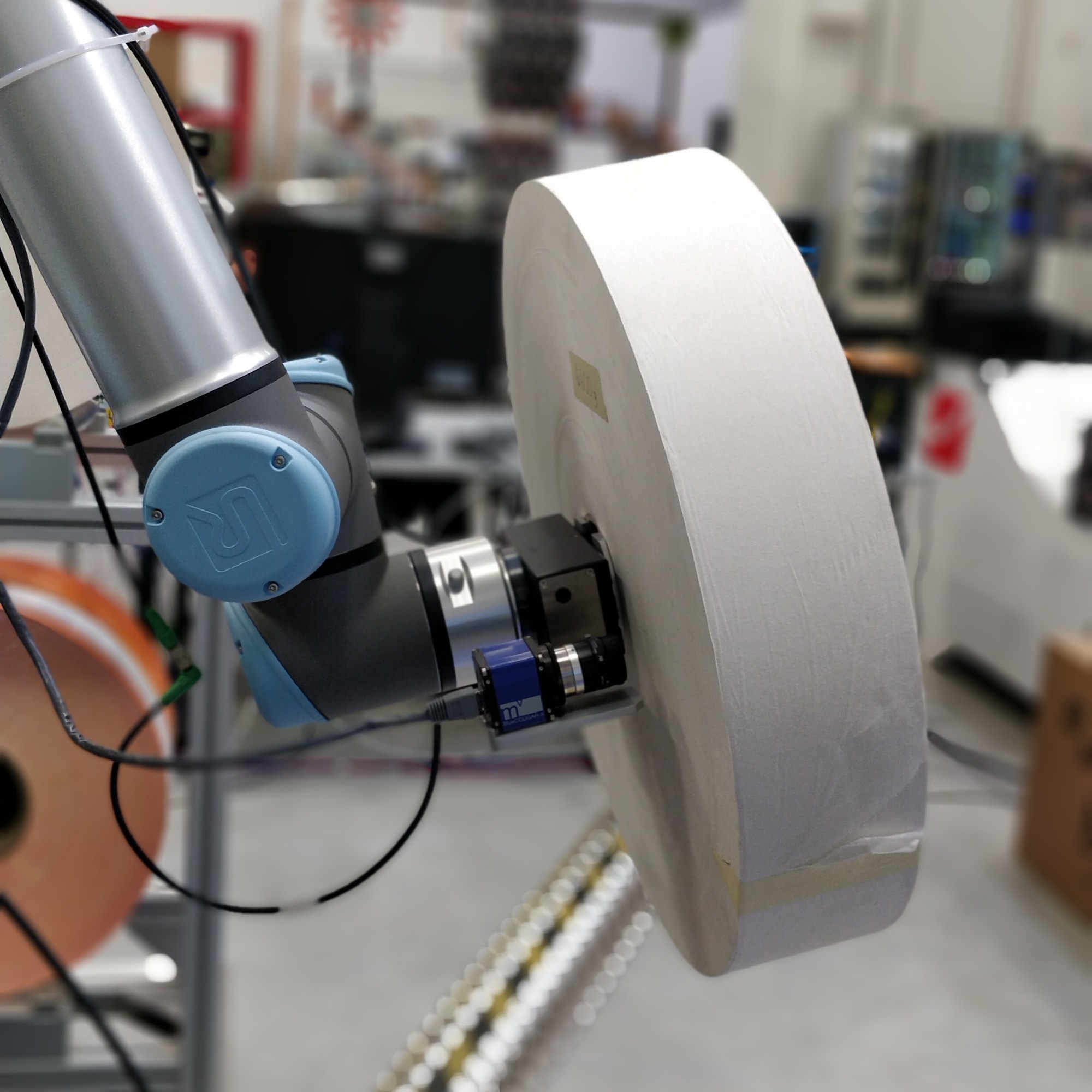
– an electrical gripper with custom fingers for reel grasping and an adaptive 3-finger gripper used for reel-core removal;
– a 2D industrial camera used for marker detection and reel-pose estimation;
– an industrial PC used for high-level robot control, virtual scene management and sensor/gripper communication and control;
– a set of safety PLCs and other electronic devices that allow the AMR to be connected to a safety-rated Wi-Fi for safety signals distribution and to a standard LAN for task communication and status feedback.


The machine-tending-task request, triggered by the machine, is processed by a task manager, which decides where to allocate the task (human operator or AMR) according to the current situation and resource availability. If the task is assigned to the robot, a new mission will be added to its queue and executed as soon as possible. Hence, the robot first navigates to a local deposit where the reels are stocked and detects the exact position of both the deposit and the reel to pick with respect to its current position. This is needed to replicate the given scenario in a virtual scene to plan collision-free trajectories on the fly. Once the reel is loaded on board, the robot moves in front of the machine that triggered the request and scans the mandrel to locate it precisely before removing the core of the finished reel and inserting the new buffered one aboard.
The whole procedure is constantly monitored by an innovative set of safety cameras which can measure the distance between the robot and any human approaching it. This value is used first to reduce the speed of the moving robotic arms of the robot and, eventually, safely alt it when too close. This safeguard stop is a particular feature of any collaborative robot, which can resume the paused process as soon as the alerting signal disappears.
Project Goals
The specific objectives of the ROSSINI project for the use case at hand are:
- development of a mobile collaborative robot that:
- can process payloads up to 10 kg;can autonomously feed the machine with raw-material reels;enhances human-robot collaboration;ensures dynamic safety;
- can adapt to small changes in the surrounding environment;
- increasing efficiency/output;
- increasing job quality;
- showing an innovative way of working in a shared but human-safe environment with an integrated vision-based monitoring system.

Related Works
For even more details, please visit the official page of the project: https://www.rossini-project.com/
The following scientific papers were published upon the results achieved in this project by members of our research group:
- Comari, S., Carricato, M. 2022. Vision-Based Robotic Grasping of Reels for Automatic Packaging Machines. Applied Sciences, 12(15), Paper No. 7835. DOI: https://doi.org/10.3390/app12157835
- Comari, S., Di Leva, R., Carricato, M., Badini, S., Carapia, A., Collepalumbo, G., Gentili, A., Mazzotti, C., Staglianò, K., and Rea, D. 2022. Mobile cobots for autonomous raw-material feeding of automatic packaging machines. Journal of Manufacturing Systems, 64, pp. 211-224.
In collaboration with: IMA S.p.A.
Do you want to know more about this project? Send us a message!


