


The term sloshing refers to the stirring of a liquid inside a container subject to external accelerations. The phenomenon is studied in different fields of engineering. For instance, the fuel movement during the launch of a spacecraft or during the cornering and braking of road vehicles (especially tank trucks) is studied to reduce the inertia actions that arise in such situations. More recently, sloshing analysis has also gained interest in industrial automation, where the leakage of molten metal in the steel industry or of liquid products in the packaging industry, must be avoided, maintaining at the same time a high productivity rate.
Industrial Context


Our studies about sloshing regard the industrial automation context, especially pharmaceutical or food&beverage production lines, where the manipulation of liquid-filled containers is typically assigned to linear transport systems or industrial serial robots, and the required motion usually follows planar curves. In this scenario, the container motion must be performed in the fastest way, but it is important to prevent the liquid from overflowing, and it is often necessary to dirt the container walls as little as possible. In aerospace and automotive applications, spacecraft and tankers are equipped with baffles that reduce liquid sloshing, but this approach is often unfeasible in the automation industry. For this reason, suitable anti-sloshing motion laws must be planned.
Our Expertise
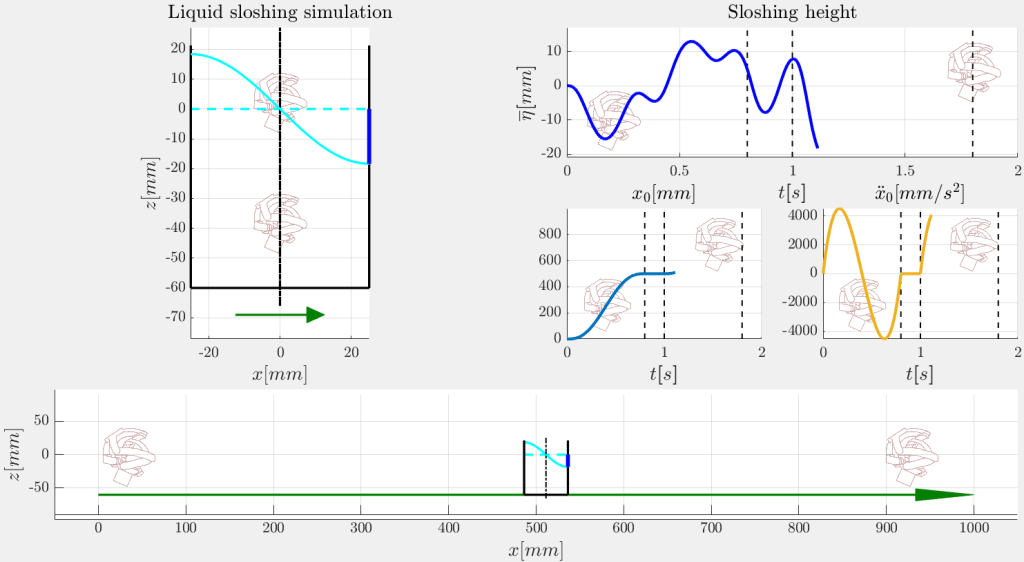
It is common to model the liquid behavior with complex fluid-dynamic simulations or discrete equivalent models built with pendulums or mass-spring-dampers systems. The drawbacks of the first technique lie in the simulation complexity and the required computational time. On the other hand, discrete equivalent systems are simple, but it is not trivial to employ their results for the estimation of measurable quantities such as the sloshing height, namely the height of the maximum liquid peak on the container wall. We propose a fast and straightforward novel method to predict the sloshing height, considering different container motions. We carried out an extensive validation campaign both for rectilinear motions executed with simple 1dof linear transport systems and for general planar motions performed by robotic manipulators, to prove the reliability of this technique.
Results
We propose different methods to obtain anti-sloshing trajectories that can be employed in industrial applications, with a specific interest in fast motions:
- input-shaping and filtering;
- constrained-optimization problems.
With these trajectories, it is possible to control the liquid free-surface motion and, eventually, to implement anti-spilling constraints.
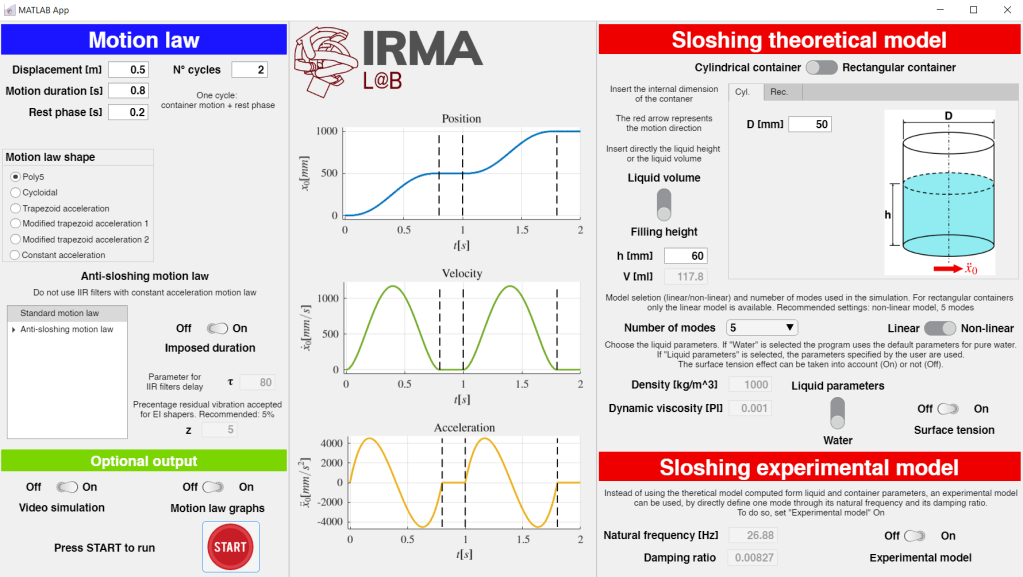
We have developed (through Matlab) a desktop application called ALiSS (Application for Liquid Sloshing Simulation) to execute fast and easy simulations of the liquid behavior in cylindrical and rectangular containers during rectilinear alternate motions. You can require ALiSS by filling out this form and sending it to luca.guagliumi3@unibo.it.
Curious to see if we had to clean the floor during our experiments? Then pop into our YouTube Channel!
