Abstract
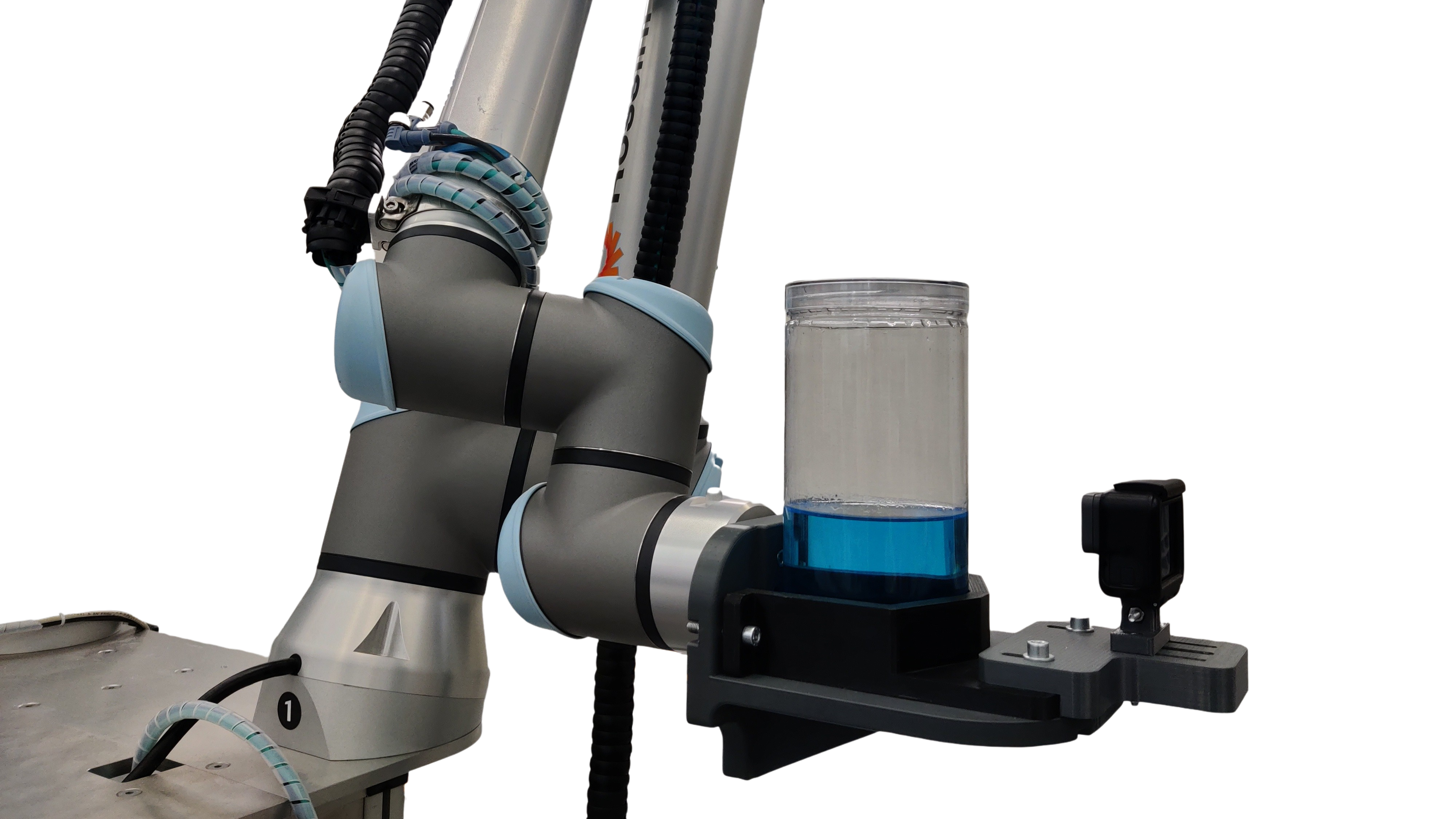
In this project, innovative motion planning and control techniques will be developed and tested for the robotic manipulation and co-manipulation of liquid containers subjected to highly dynamic spatial motions. In the field of automatic packaging machines, it is often required to handle liquids while minimizing the oscillation of the liquid inside the container (the so-called “sloshing” motion). The possibility of manipulating several cylindrical containers simultaneously by a single robot or a single container by two robots will be explored, in both prehensile and non-prehensile configurations. In the former, the robots firmly grasp the liquid containers, whereas in the latter the containers are simply placed on a tray.
Project Goals
The project aims at:
Matrix aims at developing and testing:
- motion planning and control techniques for the prehensile handling of liquid containers for highly dynamical spatial motions; in particular, the possibility of manipulating several cylindrical containers at the same time by a single robot or of a single container by two robots will be explored, as well as the possibility of manipulating rectangular trays, through the development of suitable computationally-efficient sloshing models.
- motion planning and control techniques for the non-prehensile manipulation of objects or liquid containers, for highly-dynamical spatial motions, even of several containers simultaneously.
The software platform developed by Matrix will be demonstrated in an industrially relevant environment by implementing two use cases proposed by the companies IMA and SACMI.
In collaboration with: Bi-Rex Competence Center
Do you want to know more about this project? Send us a message!


