Abstract
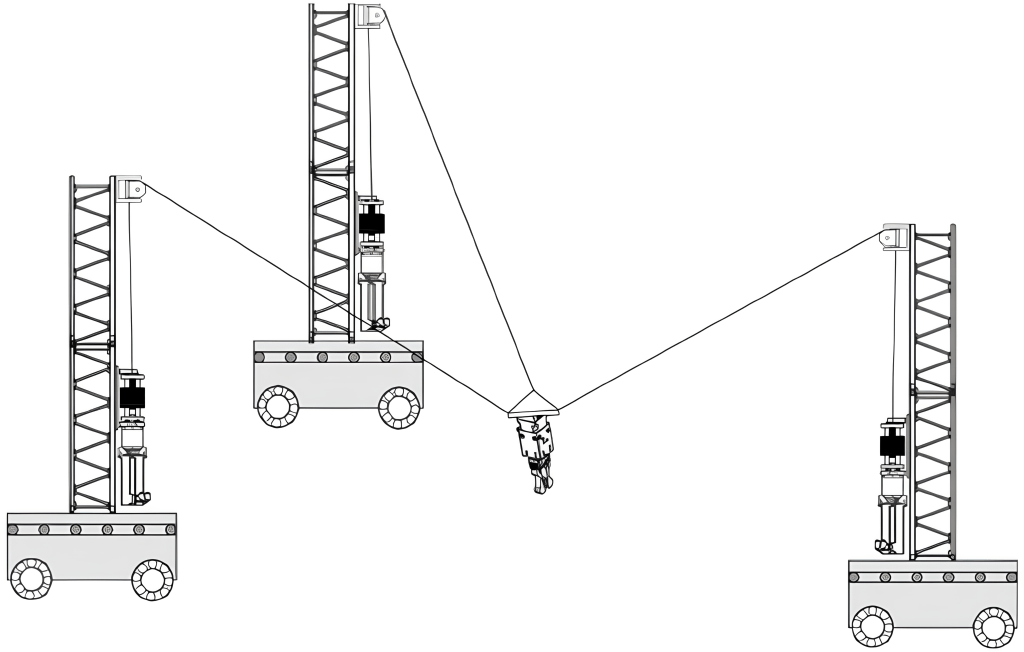
The project aims to develop a mobile and reconfigurable underactuated cable-driven robotic system, composed of 4 mobile vehicles, each one of which equipped with a servowinch . Each winch spools a cable, and all cables are connected to a shared end-effector. Thanks to this architecture, the robot fleet can move within an industrial plant, and “deploy” the cable-driven system where needed for manipulation purposes, thus targeting those situations where other intralogistics options are not available or favourable. Continuously reconfiguring the robot opens new problems for the estimation of cable-robot geometric parameters, and in general its state. Such characteristics, though, are necessary for the cable robot to be safe and effective during its operations.
Project Goals
Within the PRIN 2020 project, we aim at:
- developing a robust state-estimation strategy based on sensor-fusion techniques, and exploring several sensor sets to achieve the best possible accuracy
- use the state-estimation strategy to perform a fast and autonomous calibration of the robot after reconfiguration
- perform exemplary manipulation tasks, such as pick and place, after successive reconfigurations have occurred
Founded by: PRIN 2020
Do you want to know more about this project? Send us a message!


