Project Description
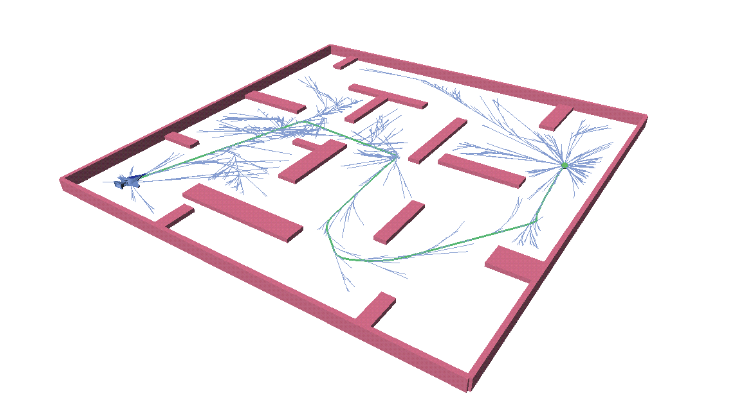
This thesis explores the use of Rapidly-Exploring Random Trees (RRT) to tackle a key challenge in robotics: planning efficient rest-to-rest trajectories for underactuated systems—systems with fewer actuators than degrees of freedom. By leveraging advanced algorithmic methods and the unique dynamics of such systems, this research aims to design smooth and efficient motion paths between two equilibrium configurations. The study will focus on simulating optimal trajectories for a 3-DoF planar Cable-Driven Parallel Robot (CDPR) using Matlab, providing practical insights and tools for trajectory planning in robotics.
Prerequisites
- Sound knowledge of Mathematical Analysis
- Strong will to cope with demanding challenges
- Keen on studying complex new theory
- Foundation of Mechanics of Machines and Rational Mechanics
Not required but good to have
- Experience with Matlab
- Basic understanding of Computer Science
Target Objectives
- Acquire competence in Automatic Control and Optimal Control Theory
- Acquire competence in trajectory planning for robotic systems
- Strengthen competence in Matlab programming
- Strengthen competence in Mechanics of Machines
Expected Results
- Understanding of RRT algorithms and their application
- Insight into the dynamics of underactuated CDPR systems
- Creation of a Matlab tool for generating RRT-based trajectories for underactuated systems
