
EXTENDEND PROJECT TITLE: Advanced maniPulation, grasping and control for enhanced machinery Autonomy and reConfigurability in pHarmaceutical processes and E-commerce packaging
Abstract
APACHE addresses key challenges in automatic machine design by enhancing system flexibility and autonomy. The project advances robotic manipulation, packaging technologies, grasping tools, and process control, contributing to a new paradigm of the robotic automatic machine, in which operations are executed through coordinated robot sequences and adaptable control units rather than single-purpose mechanisms. Such flexibility is essential in sectors like pharmaceuticals and e-commerce, where highly variable products and processes require intelligent systems capable of adapting and reconfiguring in real time.
APACHE will develop software for automatic robot-trajectory generation in complex scenarios, along with an AI-driven system for identifying, sorting, and optimally packing heterogeneous products. To further increase versatility, the project will explore novel grasping tools based on printed flexible electrostatic transducers, enabling the reliable handling of diverse items. Finally, APACHE will implement advanced, optimization-based control schemes to autonomously regulate processes and adjust system parameters without expert intervention.
Project Outline
Duration: 5 years (July 2025 – July 2030)
Location: DIGIMECH – Digital and Mechatronic Research & Innovation for Automated Machinery and Systems Joint Research Lab (Bologna)
Overall cost: 5.000.000 €; Raised funding: 2.700.000 €.
The project originates from a collaboration between IMA s.p.a. and the University of Bologna. Regarding the academic participation, three research groups are involved, including IRMA LAB (us), OPT4Smart and ADAPTRONICS.
Due to its broad perspective aimed at revolutionizing the paradigm of automatic machines, the project deals with 4 important challenges:
- Solving the robot programming bottleneck: Automated optimal trajectory planning for robotic machines [responsible: IRMA LAB]
- Mastering product variability: Deep Learning for E-commerce packaging and item manipulation [responsible: IRMA LAB]
- Beyond traditional grippers: Electrostatic transducers to overcome limits in versatile product handling [responsible: ADAPTRONICS]
- Eliminating operator-dependent process tuning: Optimization-based control for self-reconfigurable machinery [responsible: OPT4Smart]
In the following, each of the 4 challenges will be depicted in detail.
> 1. Solving the robot programming bottleneck: Automated optimal trajectory planning for robotic machines
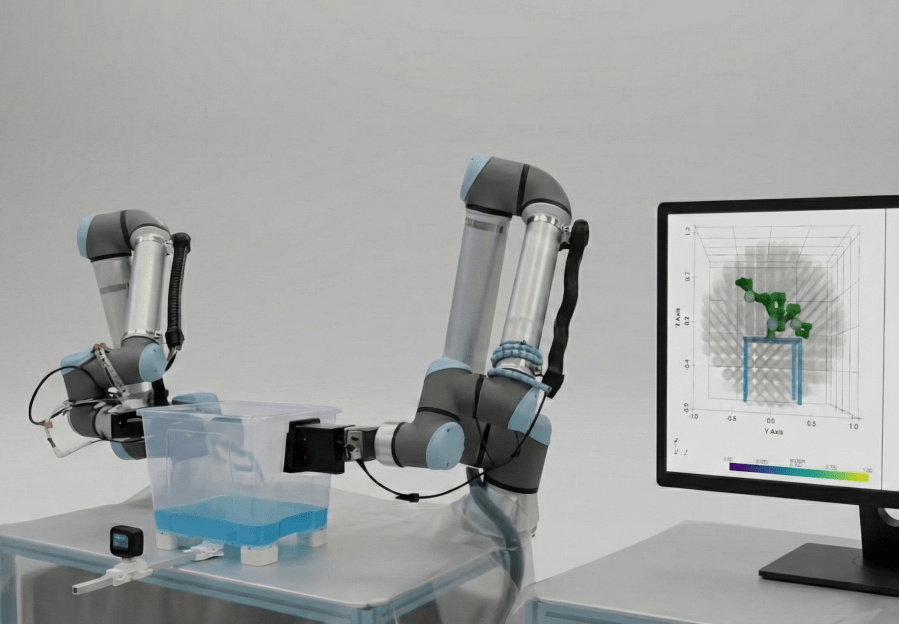
A major step toward enhancing flexibility and modularity in production systems is the transition to robotic automatic machines, where multi-degree-of-freedom robotic agents replace single-purpose servo-actuated mechanisms. Robots offer superior adaptability, but their introduction increases the complexity of programming. At present, each robot trajectory is manually designed through a lengthy trial-and-error process to meet cycle-time, collision-avoidance, and product-handling constraints (e.g., avoiding sloshing in liquid-filled vials). This approach is inefficient and unsustainable when multiple robots and product formats are involved.
This research aims to develop an automatic trajectory planning software tool capable of:
- planning collision-free, high-performance trajectories within the robot’s hardware limits and workspace constraints;
- incorporate refined trajectory performance optimizers based on specific product-handling tasks (e.g. limitation of the sloshing phenomenon);
- applying optimal control methods to ensure dynamic feasibility and prevent inter-robot collisions in shared workspaces;
- enabling real-time replanning based on sensor feedback for adaptive motion control.
The project is structured around several main tasks. First, a dedicated digital environment will be created to support robotic trajectory planning, including efficient models of product-handling dynamics relevant to the pharmaceutical sector. Once the digital twin of the operational scene has been completed, attention will focus on developing an offline trajectory planner capable of generating collision-free paths that respect robot capabilities and workspace limits.
Subsequent efforts will address inter-robot coordination in shared spaces and collaborative tasks requiring synchronous motion, such as two robots handling and filling a vial, where interaction forces and control strategies must be considered. The final phase will develop an online planner to adapt robot motion in real time based on sensor data, ensuring safe and optimal performance under unexpected conditions (like an obstacle).
The framework will ultimately be tested and integrated into IMA machines, with extensive simulations and experiments performed to validate and benchmark the developed models and algorithms.
> 2. Mastering product variability: Deep Learning for E-commerce packaging and item manipulation
The rapid growth of the e-commerce industry has created a critical need for advanced packaging automation to improve throughput and decrease costs.
A primary challenge in logistics automation is the intrinsic variability of products (shapes, textures, sizes). Currently, these sorting and packing tasks are performed by human operators, a solution that is repetitive, ergonomically hazardous, and often results in suboptimal packing. Due to this high variability, traditional robot programming is unsuitable; intelligent, automatic-learning systems capable of recognizing and manipulating diverse items are required.
The APACHE project aims to develop such a robotized system. The objective is to create a solution that accepts a set of unknown items, manipulates them, and conveniently packs them into a selected cardboard box, ready for shipping. Specifically:
- items are presented to the system (e.g., via a conveyor belt);
- the system identifies and characterizes the items using sensors and computer vision algorithms;
- a 3D-packing deep-learning (DL) algorithm identifies an optimized configuration and selects the most appropriate box from a set of different sizes;
- a robotic manipulator recreates the chosen configuration in the chosen box.
To achieve these objectives, the project is structured into key stages. Initially, a digital twin of the operational scene will be developed to accurately simulate operations and generate training data.
Next, the focus will shift to product characterization. The system must extract the information required for the packing algorithm, establishing correspondence between virtual models and real objects.
Once items are characterized, the packing algorithm will determine an optimal configuration using DL approaches.
Finally, a suitable grasping and manipulation strategy must be found. The high variance of objects does not allow for standardized picking strategies, so a DL-based algorithm will be developed for picking heterogeneous items positioned in cluttered configurations.

> 3. Beyond traditional grippers: Electrostatic transducers to overcome limits in versatile product handling
Dexterous manipulation requires grippers that are flexible with respect to the variability of the handled products. The aim is to overcome the limits of traditional mechanical and vacuum gripping by developing Advanced Grasping Tools based on Printed Flexible Electrostatic Transducers (PFETs). Firstly, software will be developed for the design and optimization of these energy-efficient, versatile PFET grippers, characterizing their interaction with various products. The main task is the validation and integration of PFET prototypes into real automatic packaging machines for both pharmaceutical and e-commerce applications, ultimately defining guidelines for their industrial adoption. This will deliver a compact, multi-material grasping solution robust against shocks, dust, and volatile solvents.
> 4. Eliminating operator-dependent Tuning: Optimization-based control for self-reconfigurable machinery
As automatic machines consist of several interconnected devices, it is fundamental to properly tune each of them in order to guarantee the desired performances. As a consequence, this task focuses on Advanced Process Control, aiming to design optimization-based control schemes. The project seeks to move beyond traditional, operator-dependent PID tuning by enhancing machine autonomy and reconfigurability through systems that can intrinsically enforce constraints and adapt parameters. The fulfillment of this ambitious objective involves the development of control-oriented models and data acquisition routines. This is followed by the design of advanced schemes, including Model Predictive Control (MPC) and hierarchical control, which are enhanced by the employment of learning procedures to capture unmodeled dynamics. The work concludes with the validation and testing of these novel control schemes on a realistic IMA prototype platform.
Do you want to know more about this project? Send us a message!


