Project Description
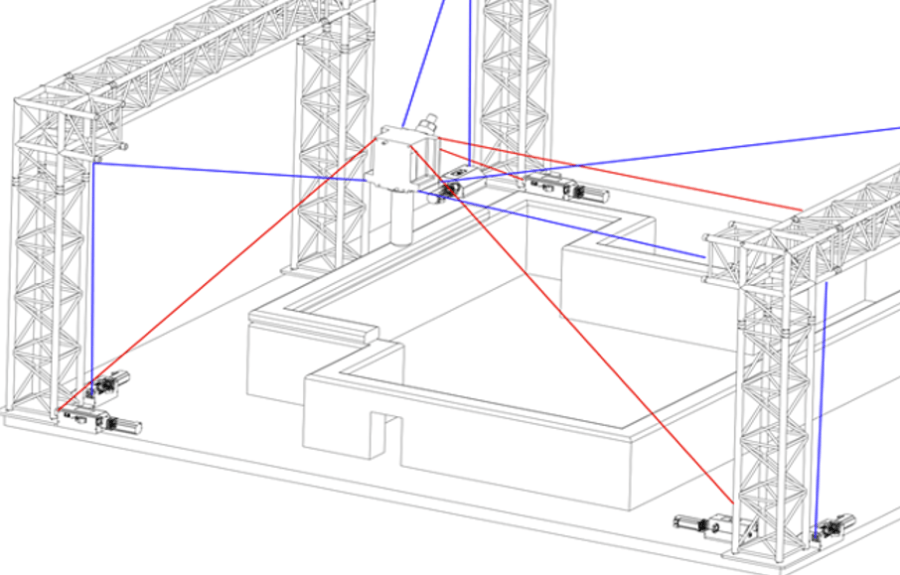
Cable-driven parallel robots use cables instead of rigid links to move an operating tool in space. They are naturally well-suited for large-scale operations but are limited by cables only exerting unidirectional forces. Therefore, their architecture needs to be optimized depending on the desired operational space and the expected loads that the tool exerts on the robot end-effector. This project aims at investigating optimal architectures for the operation of an extruder mounted on the robot platform. Depending on the project outcome and available funding, a prototype may be designed, manufactured, and tested.
Prerequisites
- Sound knowledge of basic mathematics
- Sound knowledge of basic robotics
- Strong initiative and attitude problem solving
- Strong will to cope with demanding challenges
- Good knowledge of Matlab
Target Objectives
- Improve knowledge about standard optimization algorithms
- Acquire competence in the designing of industrial robots
Expected Results
- Development of a new end-effector by taking into account the constraints depending on the robot’s aim
