Project Description
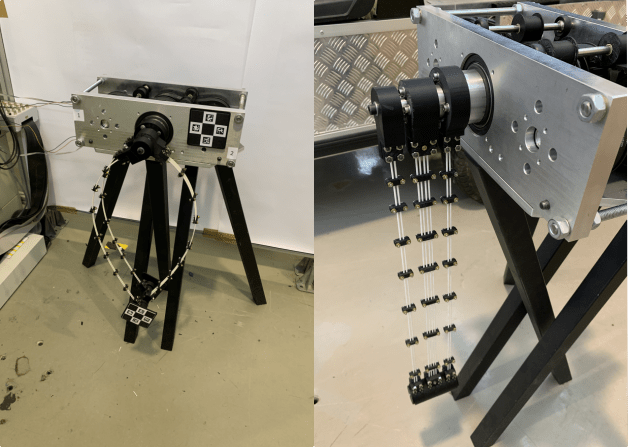
Continuum robots (CRs) are manipulators usually made of slender flexible components, developed to respond to the increasing necessity of safe interactions between robots and the environment. CRs are well suited for applications where the stiffness of rigid-link robots is considered a disadvantage. Continuum parallel robots (CPRs) have been proposed to mitigate the disadvantages typical of serial continuum robots such as their reduced payload capability. CPRs are commonly made by flexible beams disposed in a parallel arrangement, and connected to a rigid end effector. Despite the great effort dedicated to CRs accurate modelling, shape sensing techniques are at an early stage. Moreover, while IMUs are currently employed in serial CRs (mounted at the end effector, or in several intermediate sections) this topic remains unexplored in CPRs. In this project, we propose the application of IMUs for the reconstruction of the shape of a continuum parallel robot. IMUs will be placed on the beams, and, thanks to the obtained data, their shape could be reconstructed.
Prerequisites
- Basic knowledge of Matlab
- Basic knowledge of Arduino or STM microcontroller programming
- Keen on studying complex new theory
- Basic knowledge on numerical mathematics (nonlinear equations and differential equations)
Target Objectives
- Foundation of IMU employment
- Foundation of continuum robot modelling
- Strong knowledge of applied numerical mathematics
Expected Results
- Application of several IMUs for the shape estimation of an isolated beam
- Application of several IMUs for the shape estimation of a CPR.
- Investigation of influence of sensor error on the predicted shape.
- Development of a feedback-controller for quasi-static motions.
