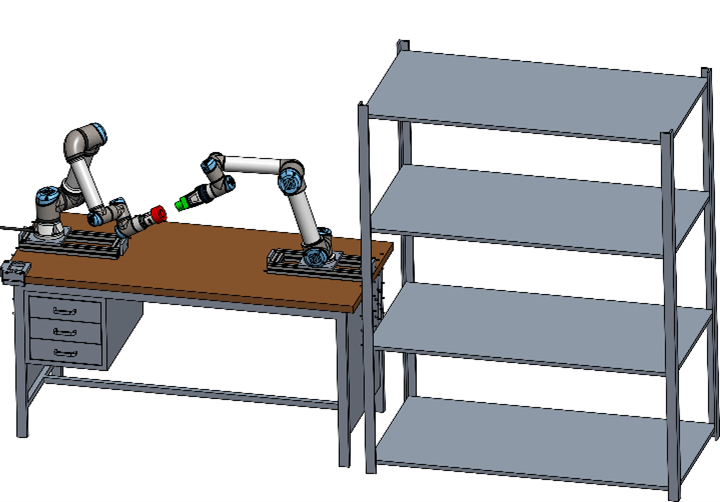
Project Description
The project’s aim is to employ a dual-arm setup for the accomplishment of a peg-in-hole task. Peg-in-hole is a type of assembly task in which a convex object (peg) has to be plugged into its concave counterpart (hole) of the same shape. The main idea is to deal with two serial robots, each one of them assigned with a precise job: while the first robot holds the hole in position, the second robot, which is force-controlled, has to insert the peg. The feedback received from the sensor attached to the second-robot end-effector is used to adjust the motion in order to facilitate the insertion of the peg.
Prerequisites
- Sound knowledge of mechanics of machines
- Sound knowledge of kinematics and dynamics of robots
- Good programming skills
- Strong initiative and attitude problem solving
- Strong will to cope with demanding challenges
- Keen on studying complex new theory
Not required but good to have:
- Knowledge of Python programming
- Knowledge of C++ programming
- Knowledge of ROS
Target Objectives
- Improved programming skills and ability to use third-party software (ROS)
- High-level robotic programming
- Foundation of force-feedback control
Expected Results
- Study of ROS and IRMA software
- Development of a ROS-based package for accomplishing the peg-in-hole task
- Experimental tests
