
Abstract
The OMNI project aims to create an innovative transmission for the actuated axes of articulated robots. The most significant features of this kind of robots are the positioning accuracy, the high global stiffness against the requested payload, and the extremely low hysteresis. According to the most used electric motors and angular speed requirements for each axis, high reduction ratios are generally required for this application (up to 160:1). Additional needs coming from the robot market are a high modularity in the motor and speed-reducer combination, as well as improved efficiency in comparison to current transmissions.
State-of-the-art and project development
The technology of planetary gear reducers is a mature and consolidated one, and Bonfiglioli S.p.A. (the project’s main partner) is the global leader in this technology. Planetary gear reducers satisfy many requirements of articulated robots, but they cannot reach levels of angular backlash below 2-3 arcmin. Typically, lost-motion limits for current planetary gearboxes are in the range of 3÷12 arcmin. Even higher values can be found in planetary multistage solutions.
In this scenario, the OMNI project will develop a particular innovative transmission system, based on a “Wolfrom” differential planetary train combined with “Beveloid” architecture gears. This new concept should allow the gearbox to reach a degree precision that meets the robotic application requirements, thanks to self-adjustment of gear backlash (less than 0.6 arcmin). Moreover, one of the main features of Wolfrom transmission technology is the capability to reach high reduction ratios in one stage and in a relatively compact space. Hence, this specific transmission system is supposed to meet all the main targets of robot applications: high stiffness and positioning precision, high ratio in a compact space, and last but not least, good efficiency bringing a reduction in energy consumption.


Project Goals
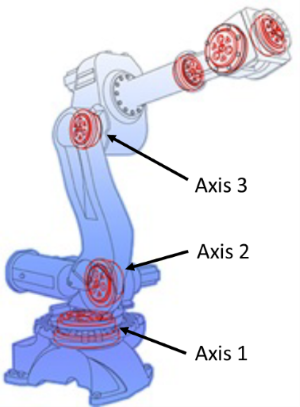
The project purpose includes the introduction into the market of a new series of gear transmissions for the control of the first 3 axes of articulated robots, with transmissible torque from 100 Nm to 3600 Nm, and several available reduction ratios. Two layouts have been conceived, with a solid shaft and a hollow shaft with a spur gear pre-stage. This second configuration allows fitting cables, as usually required for the upper axes of the robot.
The project plan includes the following steps:
- developing 3 pilot sizes for the first three axes of the most commonly used robots;
- definition of the main gear parameters and optimization of the micro gear profile to minimize backlash;
- definition of the duty cycles to be used in validation tests, representative of real working conditions from the viewpoint of cumulative damage on gears, shafts, and bearings;
- experimental validation for performance and reliability evaluation through test benches that simulate the real behavior of the transmission in a robot;
- design of the remaining sizes with nominal transmissible torque up to 3600 Nm, in order to cover the load requirement of the most used robots in industrial applications.

In collaboration with: Bonfiglioli S.p.A.
Do you want to know more about this project? Send us a message!


